Достаточно долго и давно использую системы автоматизированного проектирования в своей профессиональной деятельности и повседневной жизни для прикладных задач разного рода. И на досуге пришла мысль о том, что параметризация может быть крайне полезной для курсового проекта по теории механизмов и машин в части построения плана положений механизма и оценки его кинематики и геометрии. Конечно же, только этим ее применение ни в коем случае не ограничивается :)
Для примера возьмем простой дезаксиальный кривошипно-шатунный механизм:
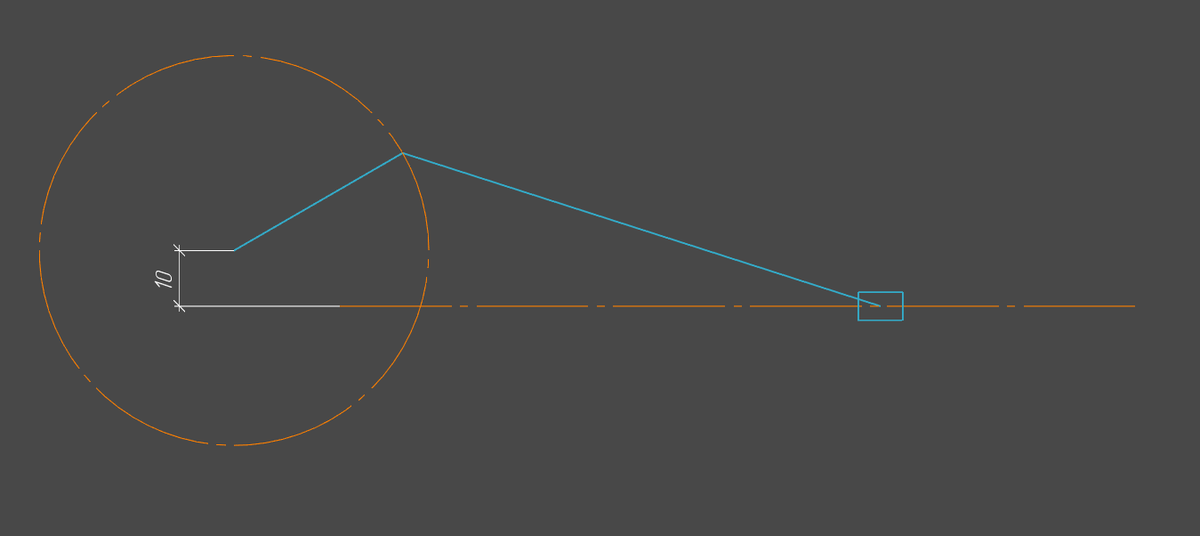
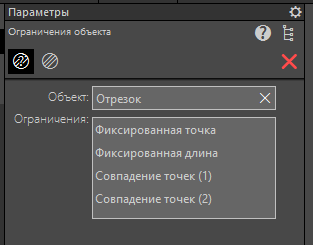
Рассмотрим начальное звено - кривошип. Он совершает только вращательное движение вокруг неподвижной стойки по окружности, значит на точку кривошипа, связанную через шарнир со стойкой, накладываем зависимость (ограничение) "фиксированная точка". Линейные размеры кривошипа во время движения не изменяются, поэтому на кривошип накладываем ограничение "фиксированная длина". Т.к. кривошип находится в зацеплении с шатуном через шарнир и образует с ним вращательную кинематическую пару, то на точку кривошипа, совпадающую с шарниром, накладываем ограничение "Совпадение точек". Аналогичное ограничение на соответствующую точку шатуна появится автоматически. Вот какой список ограничений имеем у кривошипа:
Теперь перейдем к направляющей ползуна, которая нарисована штрихпунктирной линией. На нее накладываем "горизонтальность". "Cовпадение точек" получится автоматически при установке вертикального размера, определяющего смещение оси движения ползуна относительно оси шарнира на стойке, если его установить, включив параметрический режим. Можно и вручную. Данный размер можно изменять как параметр, и смещение изменится автоматически. Можно данный размер и не устанавливать, а ось ползуна ограничить "фиксированными точками". К этой оси мы еще вернемся.
Займемся ползуном. Лучше всего его сразу начертить, как прямоугольник, а не набор отрезков. Тогда он автоматически становится "жесткой" фигурой и ортогонален по умолчанию. Связываем одну из его горизонтальных сторон ограничением "параллельность" с осью ползуна, а центр прямоугольника привязываем "совпадением точек" к оси ползуна. Это будет необходимым и достаточным условием существования у него лишь одной степени свободы - поступательной вдоль оси (направляющей).
Вернемся к шатуну. С кривошипом шатун уже соединен и наложены ограничения "совпадение точек" в шарнире. Теперь нужно соединить шатун с ползуном и наложить на соответствующие точки ограничение "совпадение точек", а так же "фиксированная длина" на длину шатуна. У меня еще на вторую точку шатуна наложено ограничение "точка на кривой" в привязке к оси шатуна. Но, по сути, эта зависимость уже избыточна. Не помню я, почему она у меня там появилась. Попробуйте ее не добавлять, проведите эксперимент сами. :)
В итоге для шатуна, ползуна и оси имеем следующий список ограничений (листайте):
Стоит отметить, что многие из этих ограничений можно наложить на точки и отрезки автоматически, если чертить схему в параметрическом режиме, который можно включить на панели инструментов. Но некоторые, все-таки, придется добавить вручную.
Что ж, мы с вами получили модель плоского рычажного механизма. Но как же это поможет нам в итоге? Теперь начинается та самая "магия", ради которой это все было сделано. Поскольку начальным звеном у нас является кривошип и к нему привязана обобщенная координата механизма - угол его поворота, то проверять кинематику механизма и строить план его положений будем путем изменения положения "рукоятки" отрезка-кривошипа, которая находится в шарнире. Выделяем отрезок-кривошип и тянем за "рукоятку" вдоль штрих-пунктирной окружности:
Дальше уже - дело техники. Копируем рядом всю кинематическую схему. На первой выставляем любой необходимый нам угол кривошипа и полученное положение просто копируем на вторую схему. И так - ровно столько итераций, сколько нужно. Удобнее всего заранее построить эти углы вспомогательными линиями из центра окружности, или разбить ее на равные части точками. Обычно при курсовом проектировании по теории механизмов и машин строят 12 положений механизма с определенным шагом обобщенной координаты. В нашем случае это - угол поворота кривошипа. Хотя сам угол поворота может быть функцией времени, например.
Данный способ построения планов положений является всего лишь лайфхаком, наколенным костылем, одним из возможных вариантов наряду с классическим, однако позволяет такие манипуляции проделать с любым исследуемым механизмом. Все современные САПР общего назначения обладают подобным функционалом, будь то - КОМПАС 3D, AutoCAD, nanoCAD и т.д. В общем случае для таких задач существует специализированный софт, такой, как Linkage.