Хирургический робот da Vinci - это инновационная малоинвазивная методика лечения онкологических заболеваний, доброкачественных опухолей, грыж, пролапса и других заболеваний. Система состоит из трех консолей: консоли хирурга, консоли пациента, видеостойки. Хирург проводит операцию за консолью хирурга, управляя инструментами при помощи джойстиков и наблюдая за операционным полем в 3D-видеоискатель. Непосредственно хирургическое вмешательство происходит за консолью пациента, где миниатюрные инструменты EndoWrist через небольшие разрезы (не более 1 см) выполняют прецизионные движения, транслируемые с консоли хирурга врачом.
Инструменты EndoWrist являются одной из ключевых технологий, позволяющей роботу da Vinci выполнять хирургические вмешательство максимально эффективно.

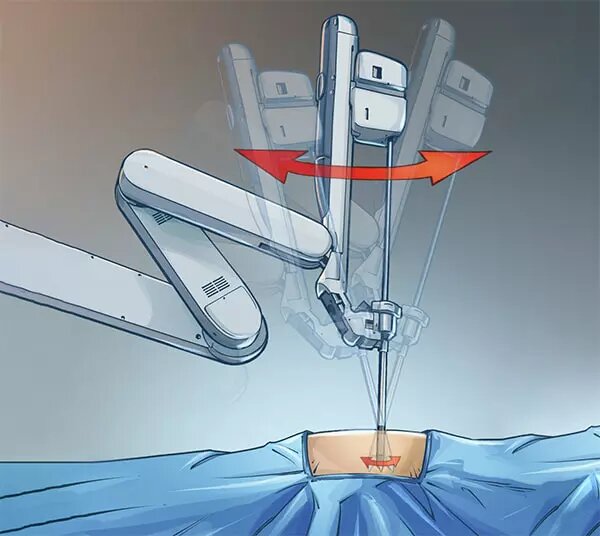
Инструменты робота da Vinci EndoWrist представляют из себя длинные стержни, оканчивающиеся маленькой инструментальной частью, их конструкци повторяет человеческое запястье. Хирургические инструменты устанавливаются на 3 роботические руки консоли пациента, наконечники помещаются внутрь тела человека для проведения манипуляций.
Среди достоинств инструментов EndoWrist выделяют:
- свобода манипуляций, превосходящая возможности человеческой руки;
- 90 градусная артикуляция;
- возможность выполнять повороты на 540°;
- нивелирование дрожания рук;
- масштабирование манипуляций хирурга и точность передачи движений;
- технология удаленного центра, снижающая воздействие на ткани в местах прокола даже при наиболее амплитудных движениях.
Особая запястная конструкция инструментов EndoWrist придает инструментам повышенную подвижность и ловкость, превосходящую возможности человеческой руки. Эти возможности инструментов позволяют минимизировать травматизацию здоровых тканей, минимизируя кровопотерю и уменьшая риск последующих осложнений.
Функционал роботических инструментов
Существуют различные типы инструментов, условно их можно поделить на группы по выполняемым функциям. Выделяют 5 основных функций инструментов Endo Wrist:
- сшивание тканей, фиксация нити шва на узел;
- рассечение шва;
- захват ткани, ретракция, рассечение, разрезание, коагуляция и монополярная резка;
- действия с нитью и иглой.
Классификация инструментов
Инструменты робота da Vinci различаются по типам задач. Выделяют такие типы инструментов:
- Зажимы, с использованием которых производится захват, уменьшение объема тканей и другие манипуляции;
- Иглодержатели, выполняющие действия с иглой;
- Монополярные и биполярные электрохирургические инструменты для захвата, ретракции, рассечения, разрезания ткани, коагуляции (остановки кровотечения с помощью прижигания электрическим током) и монополярной резки;
- Ультразвуковые инструменты Harmonic, контролирующие кровотечение и минимизирующие тепловые травмы.
- Ножницы для рассечения тканей и разрезания швов, узлов;
- Степлер для выполнения рассечения, резекции, сшивания ткани.
- Электрокоагулятор для сосудов, применяемый для коагуляции и проведения других манипуляций с сосудами.
Статья основана на данных сайта intuitive.com.
Материал подготовлен редакцией портала robot-davinci.ru .