История развития и применения роботизированных комплексов в медицинской реабилитации
В настоящий момент трудно представить себе медицинскую реабилитацию без применения различных аппаратов. Механотерапия – это метод физической реабилитации с использованием специальных устройств и тренажеров.
История развития этого направления начинается в конце позапрошлого века. Его отцом-основателем является шведский физиотерапевт Йонас Густав Вильгельм Зандер, который в 1887 году представил «медико-техническую терапию». Аппараты из дерева, кожи и металла позволяли точно дозировать физические упражнения на отдельные суставы и группы мышц. Именно ему принадлежит идея приводить медицинские аппараты в движение при помощи парового, бензинового или электрического двигателя.
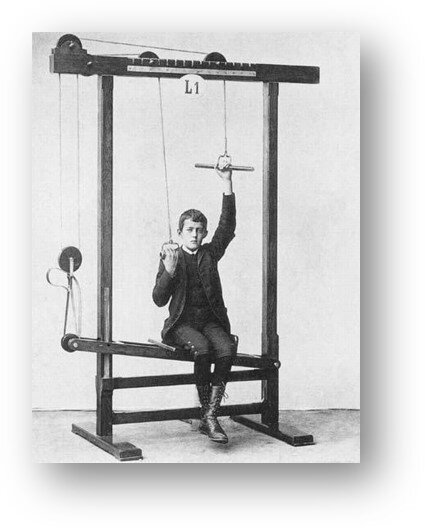
Эти аппараты имели большой успех и популярность. До сих пор в курортном парке города Ессентуки можно посетить павильон механотерапии, оснащённый аппаратами Густава Зандера и испытать на себе их эффективность. Посмотреть, как они работают, можно в одном из эпизодов культового фильма Владимира Меньшова «Любовь и голуби».
В начале XX века в Лозанне Чарльз Шольдер основал ортопедический институт и разработал аппарат для механотерапии «Arthromotor», позволяющий работать с различными суставами.
В 1926 году в Копенгагене Вон Римке (Von Riemke) изобрел новый «метод мобилизации суставов после травм»: Он разработал аппарат, который можно было использовать в первый день после операции благодаря тому, что воспроизводимые движения из-за своей малой скорости были незаметны для пациента.
В 1928 году в Мюнхене H. Lohe представил свое оснащенное мотором двигательное устройство, призванное производить мобилизацию тугоподвижных суставов. Аппарат позволял точно регулировать силу и скорость работы мотора. Впервые большое внимание было уделено совпадению осевых линий конечности и аппарата.
Таким образом, в работах Von Riemke и H. Lohe, написанных более 80 лет назад, содержались основополагающие принципы, которые легли в основу СРМ-терапии (continuous passive motion).
Роберт Сальтер в 1978 году разработал оснащенный мотором аппарат для разработки суставов путем выполнения непрерывных пассивных движений и доказал эффективность СРМ-терапии, подчеркнув, что именно первая неделя после операции является самым важным периодом реабилитационного лечения.
Классификация механоаппаратов:
- По анатомическому принципу (руки, ноги)
- По функциональному тренингу (мышцы, ССС, координация и т.п.)
- По принципу участия (пассивные или активно-помогающие)
- По модальности раздражителя и их комбинации (с ФЭС, с изменением положения тела)
- По объему вовлекаемой мускулатуры и сложности двигательного акта
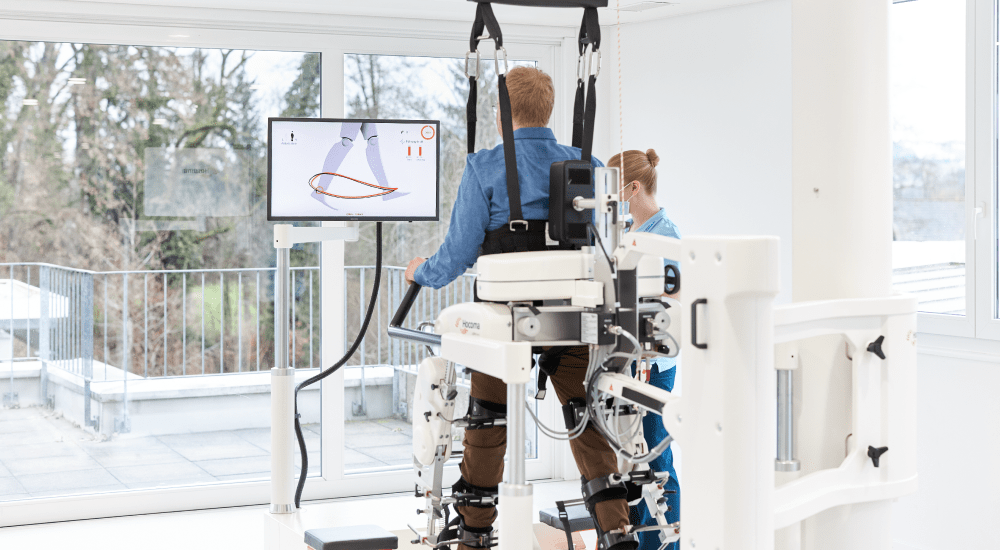
Роботизированная механотерапия
следующий этап в развитии медицинской реабилитации
Робот — это автономный аппарат или устройство, осуществляющий различные действия свойственные человеку, и выполняющий их «как- будто под контролем человеческого разума»
Основные функции роботов:
- способность выполнять определенные действия
- решать задачи на запрограммированной основе
- интерпретировать команды оператора и модифицировать ответы на них
Несмотря на то, что слово «робот» было предложено чешским художником Йозефом Чапеком и использовано его братом, писателем Карелом Чапеком в пьесе «Россумские универсальные роботы» в 1920, идея механических помощников человека уходит глубоко в историю. Наиболее известным является рыцарь Леонардо да Винчи, в честь которого названа современная хирургическая система.
Реабилитационные роботы – специализированные устройства, позволяющие выполнить или заместить утраченную или нарушенную двигательную функцию человека полностью или частично.
Первый роботизированный тренажер для руки был разработан в середине 1990-х гг. - аппарат MIT-Manus.
Он осуществлял разгрузку руки пациента в гравитации и отображал траекторию движения руки пациента на экране монитора.
Ещё более современный этап в реабилитации с применением специализированных устройств:
Биологическая обратная связь (БОС) — технология, позволяющая корректировать физиологические параметры человека посредством внешней обратной связи. Реализуется БОС с помощью компьютерной техники и различных датчиков.
Реабилитационный комплекс Motion Maker(с БОС) осуществляет функциональную электростимуляцию мышц бедра и голени с обратной связью по ЭМГ-сигналу, в активно-пассивном режиме.
Дальнейшее развитие привело к созданию:
Нейрокомпьютерного интерфейса - технология прямого обмена информацией между мозгом и компьютером либо другим электронным устройством.
В медицинской реабилитации применяются неинвазивные технологии, перспективные в восстановлении двигательных навыков и речевой функции.
Термин Brain-computer interface - BCI, интерфейс «мозг — компьютер» предложил Жак Видаль в 1973 году.
В 1991 году J Wolpaw продемонстрировал возможность управления курсором мыши с помощью НКИ на основе системы с ЭЭГ.
Классификация нейрокомпьютерных интерфейсов:
Неинвазивные
- Электроэнцефалография
- Электроокулография
- Магнитоэнцефалография
- Функциональная МРТ
- Инфракрасная спектроскопия
- Позитронно-эмиссионная томография
Малоинвазивные:
- Внутрисосудистые электроды
- Электрокортикография
Имплантированные электроды
Впервые электроды для НКИ были имплантированы человеку в 1998 году Филиппом Кеннеди. На нескольких пациентах, в том числе и на себе, он испытал систему распознавания речи.
Таким образом, от деревянных аппаратов с механической тягой медицинская реабилитация шагнула в совершенно фантастические дали и не останавливается на достигнутом.