При написании данной статьи были использованы материалы из книг по судовому электрооборудованию таких известных авторов как Яковлев Г.С., Роджеро Н.И, Осокин Б.В., Хайдуков О.П. и другие.
Распределение реактивных нагрузок между параллельно работающими синхронными генераторами обеспечивается характеристиками их автоматических регуляторов напряжения.
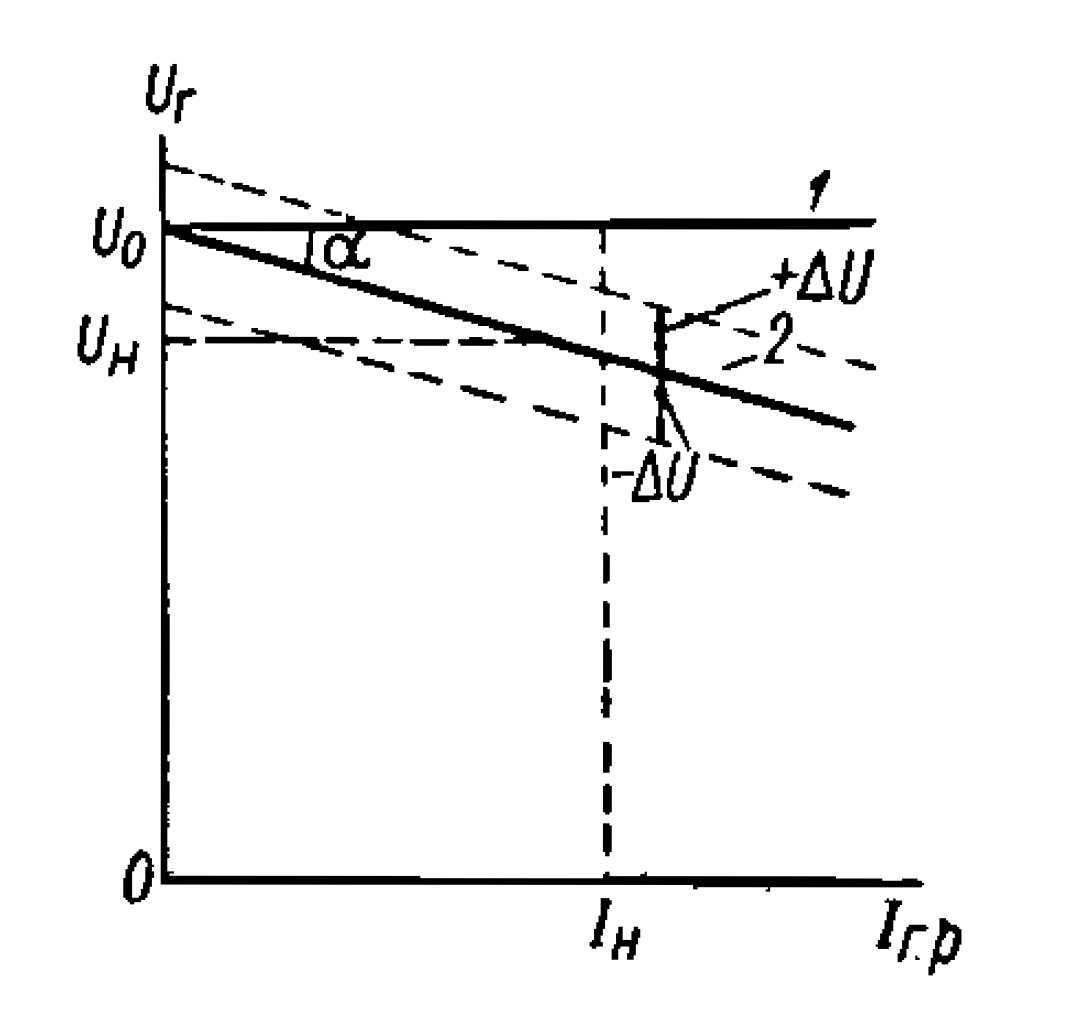
Характеристики могут быть Астатическими 1 и статическими 2 (рис.1).
АСТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА: При астатическом регулировании регулятор АРН поддерживает напряжение судового генератора строго постоянным независимо от изменения тока нагрузки Iг.р.
САТИЧЕСКАЯ ХАРАКТЕРИСТИКА: При статическом регулировании величина напряжения судового генератора не остается постоянной с изменением нагрузки. Изменение напряжения при этом определяется углом (крутизной) наклона статической характеристики или СТАТИЗМОМ, который численно равен:
K = ((Uo - Uн)/Uo)*100%.
где:
Uo - напряжение холостого хода генератора,
Uн - номинальное напряжение генератора при номинальном токе нагрузки (при номинальной нагрузке).
Если у Вас на судне в функции системы PMS не входит равномерное распределение реактивных нагрузок между параллельно работающими генераторами, то этим занимается регулятор напряжения (зачастую так всегда, но я встречал электростанции на контроллерах DEIF, которые сами распределяли реактивные нагрузки, подавая сигналы управления на AVR для изменения тока возбуждения).
Для того, чтобы обеспечить правильное равномерное распределение реактивной нагрузки между параллельно работающими генераторами, регуляторы напряжения используют СТАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ. При этом статические характеристики регуляторов напряжения на всех генераторах ОДИНАКОВОЙ МОЩНОСТИ должны быть одинаковыми (совпадать), иначе распределение будет неравномерным. Соответственно, чтобы статические характеристики всех регуляторов совпадали, должны быть равны напряжения холостого хода всех генераторов Uo и углы наклона характеристик (статизмы).
Для примера, предположим, что два синхронных генератора Г1 и Г2 работают параллельно. Характеристики регулирования напряжения генераторов имеют равные напряжения холостого хода Uo, но при этом имеют различный наклон (статизм) характеристик. Следовательно, их характеристики не совпадают (рис.2).
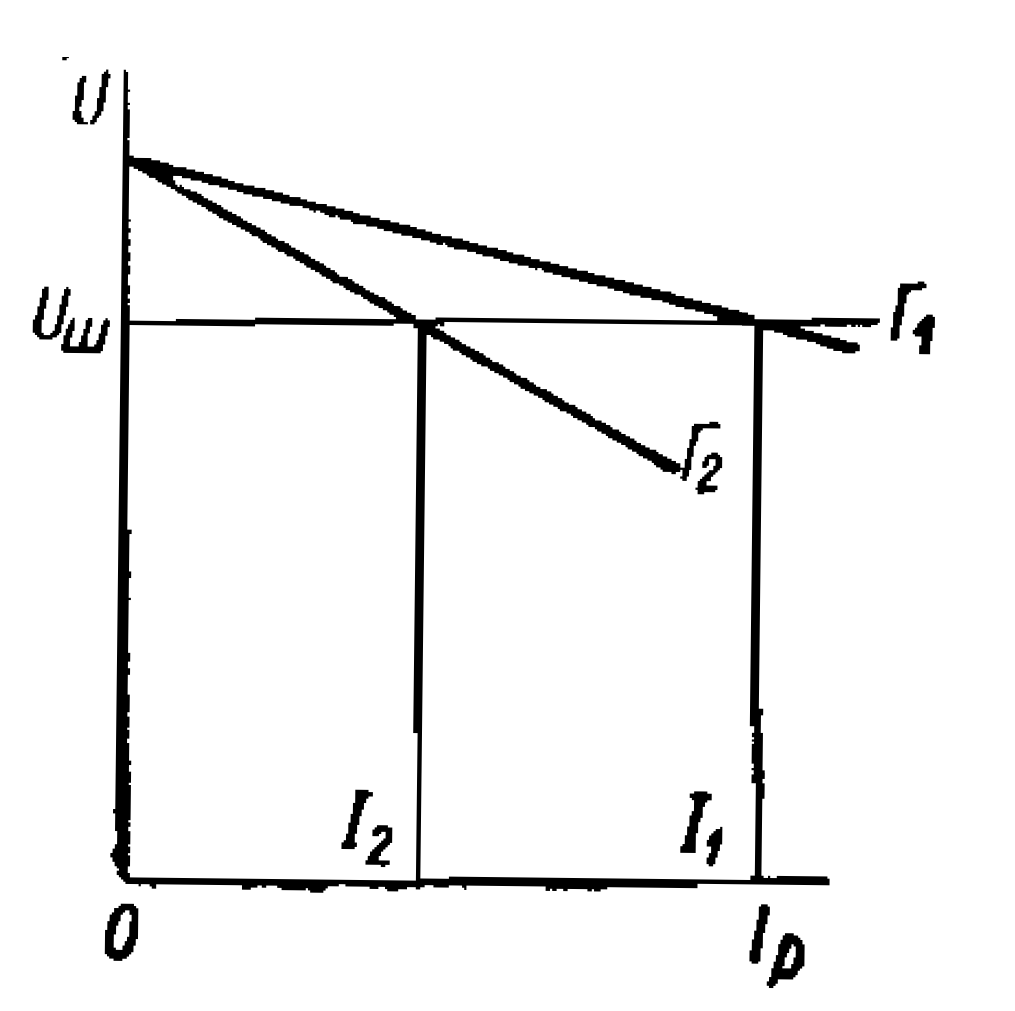
Проведем горизонтальную линию, соответствующую общему для параллельно работающих генераторов напряжению Uш на шинах судовой электростанции. Точки пересечения этой линии с характеристиками регуляторов напряжения дадут на оси абсцисс величины реактивных нагрузок I1 и I2, которую будут нести генераторы. Очевидно, что как бы не менялась общая нагрузка судовой электростанции, генератор Г1 всегда гбудет иметь нагрузку больше, чем генератор Г2. Ведь характеристики регуляторов напряжения генераторов не совпадают.
Однако, бывали случаи на практике, когда даже при совпадающих характеристиках автоматических регуляторов напряжения есть небольшая разница реактивных нагрузок на параллельно работающих судовых синхронных генераторах. Это происходит потому, что на правильность и постоянство распределения нагрузок при параллельной работе генераторов очень большое влияние оказывает зона нечувствительности регуляторов напряжения. Я делал об этом видеоролик, вот ссылка:
Для примера разберем как влияет зона нечувствительности регуляторов скорости ДГ на распределение активных нагрузок (рис.3):
Что такое зона нечувствительности я рассказал на видеоролике по ссылке выше.
Из рис.3 видно, что наличие даже относительно небольшой зоны нечувствительности регулятора приводит к большим колебаниям распределения нагрузки между параллельно работающими генераторами. На генераторе Г1 нагрузка будет колебаться в пределах Р1 +/- дельта Р. На генераторе Г2 - Р2 +/- дельта Р. Если два одинаковых генератора работают в параллели и характеристики их регуляторов полностью совпадают, то при наличии зоны нечувствительности они НИКОГДА НЕ БУДУТ нагружены одинаково. Аналогичная картина будет и с распределением реактивных нагрузок вследствие нечувствительности регуляторов напряжения.
Из рис.3 можно увидеть один важный момент: ПРИ БОЛЬШЕМ СТАТИЗМЕ ХАРАКТЕРИСТИК ЗОНА НЕЧУВСТВИТЕЛЬНОСТИ ДАЕТ МЕНЬШИЙ РАЗБРОС НАГРУЗОК МЕЖДУ ПАРАЛЛЕЛЬНО РАБОТАЮЩИМИ ГЕНЕРАТОРАМИ.
Следовательно, в общем случае для лучшего распределения реактивных нагрузок следует стремиться к уменьшению зоны нечувствительности и к увеличению статизма автоматических регуляторов напряжения.
Современные регуляторы напряжения не имеют настроек зоны нечувствительности, но обязательно допускают регулирование статизма с помощью настроек DROOP (чаще всего в пределах 0-6%).
Я никого не призываю, но поделюсь своим опытом: при настройках характеристик регуляторов напряжения для меньшего разброса реактивных нагрузок при параллельной работе я предпочитаю выставлять статизм равным 4-5%.
В настройках PMS судовой электростанции моего текущего судна при неравномерности распределения реактивных нагрузок более 10% от номинальной мощности наших генераторов выдается сигнал тревоги Q VAr Load Sharing Fail. Если у Вас на судне при исправных регуляторах напряжения имеется такая проблема, то стоит проверить совпадение совпадение характеристик регуляторов. Возможно, что напряжения холостого хода генераторов неравны или же неравны углы наклона (статизмы) характеристик регуляторов.
Кстати, многие регуляторы напряжения имеют также настройки GAIN и STABILITY как и говерноры. Например, EMRI регулятор. Ниже картинка из его мануала (рис.4):
Настройка этих параметров идентична их настройкам на регуляторах частоты вращения, которые я описал в своей статье по ссылке ниже:
На этом у меня все, с Вами был Алишер Ешимбетов, всем пока и до новых встреч!
**********
BRGDS,
Alisher K. Eshimbetov.
Electro-Technical Officer (ETO).
Наш телеграм-чат судовых электромехаников по ссылке:
Мой YouTube канал: