В начале рассмотим утройство и принцип работы одного из самых популярных, пусть и не самых качественных, ультразвуковых дальномеров HC-SR04.
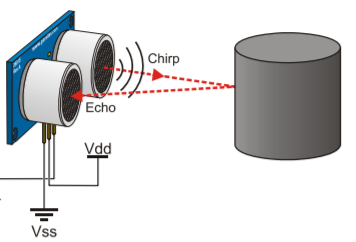
Принцип работы дальномера основан на принципе эхо-локации, т.е. измерении времени, за которое ультразвук отразится от поверхности и вернется к прибору.
Этим способом пользуются летучие мыши для оринтации в пространстве и поиске добычи.
В нашем дальномере два ультрозвуковых прибора - приемник и передатчик, а также микроконтроллер, который этим управляет.
Однако для считывания расстояния нужно управляющее устройство, мы будем использовать Arduino.
Рассмотрим, как же получить расстояние с этого датчика:
Это временная диаграмма работы дальномера. Из нее мы видим, что для запуска процесса измерения нужно подать импульс длительностью 10мкс вы ножку TRIG.
После этого из ультразвукового излучателя посылаются 8 ультразвуковых импульсов частотой 40000Гц (40кГц). Человеческое ухо слышит звук в диапазоне 20Гц-20000Гц, поэтому датчик для нас беззвучен.
Одновременно с отправкой последнего импульса на выводе ECHO появляется высокий уровень сигнала, который продержится там до получения первого отраженного сигнала. После этого выход переходит в низкий уровень.
Длительностью этого импульса и будет определяться расстояние до объекта. Чем быстрее вернется сигнал, тем ближе объект.
Как же рассчитать расстояние:
Скорость звука в воздухе - 340 м/с
Время импульса мы получим от дальномера (от 110 до 18500 мкс). Для примера рассмотрим 500 мкс.
Расстояние = Время * Скорость
Т.к. с точностью данного дальномера расстояние удобно считывать в см переведем м/с в см/мкс: 340м/с = 34000 см/с = 0,034 см/мкс
Переведя это число в простую дробь получим 1/29 см/мкс
Пройденно расстания можно рассчитать как Время/29.
Т.к. звук проходит расстояние дважды поделим полученное число на 2
Итоговая формула примет вид Расстояние(см) = Время(мкс)/58.
Перейдем к подключению и программировнию Arduino.
Схема подключения довольна проста - питание, земля и два провода в цифровые порты Arduino.