Событийный контроль
Сервер Oro поддерживает две парадигмы для доступа к своему контенту: запросы в стиле RPC (на основе стандартного языка SPARQL) или события. Модуль может подписаться на событие, зарегистрировав шаблон события (в его простейшей форме, частичное утверждение типа "Тип книги" ) и обратный вызов. Каждый раз, когда в базе знаний появляется новый экземпляр книги, вызывается обратный вызов.
Это позволяет нам писать реактивные роботы-контроллеры с высоким уровнем выразительности: например, подписавшись на событие « HUMAN1 Желания» action, «Тип действия Give», «action acts On Object» obj, «obj type Book» , мы эффективно запускаем поведение, когда человек выражает (через диалог, жесты ...), что он хочет, чтобы робот дал ей книгу.
Разработчику контроллера робота не нужно напрямую заботиться о том, как это создается желание (это делегируется модулям восприятия), вместо этого он может сосредоточиться на семантике желания.
Обратите внимание, что мы прозрачно используем возможности системы аргументации для инициирования события, чтобы инициировать события: например, тип объекта ( Book? Obj type Book) может быть явно не утвержден, но выведен аргументом, основанным на других утверждения.
Соответствие человеческим желаниям и опыту
Мы делим ситуации взаимодействия, воспринимаемые из оценки ситуации и компонентов коммуникации, на две категории: желания (связанные с перформативными актами в классификации речевых актов Остина ) и опыт .
Желания - это, как правило, человеческие команды («Дай мне эту книгу»). Характер желаемого действия (выбрать, дать, посмотреть, принести, показать ...) вместе с параметризацией действия (тематические роли) выбираются контроллером выполнения в базе знаний и отправляются либо как цели для планировщика задач или выполняются, если элементарное действие доступно непосредственно.
С другой стороны, переживания состоят из эмоций, состояний и вопросов (задавая вопрос, мы считаем, что человек находится в вопросительном состоянии ). Когда база знаний заявляет, что агент испытывает определенную эмоцию или состояние, контроллер выполнения может решить обработать его, обычно пытаясь ответить на вопрос или используя эмоциональное или физическое состояние в качестве параметра для последующих действий. Например, когда говорящий говорит: «Я чувствую усталость», мы меняем параметризацию планировщика движений, чтобы уменьшить усилие, которое требуется человеку для выполнения следующих задач совместной манипуляции.
Усовершенствование действий с учетом человеческого фактора
Перед выполнением элементарные действия дополнительно уточняются исполнительным контроллером с помощью набора специализированных функций планирования геометрических движений, ориентированных на человека, предоставляемых компонентом, называемым Mhp.
Эти функции предназначены для планирования навигационных и манипуляционных , путей не только безопасных, но и удобных и социально приемлемых путем явного обоснования кинематики, поля зрения, позы и предпочтений человека. Они также предоставляют процедуры для вычисления пространственного размещения робота и объектов, которые подчиняются ограничениям, связанным с взаимодействием, таким как оптимальная взаимная достижимость или оптимальная видимость .
Наконец, когда действие требует движения как человека, так и робота, Mhp может планировать их обоих, чтобы робот мог взять на себя инициативу, автоматически вычисляя, где взаимодействие может предпочтительно иметь место. Это может эффективно сгладить взаимодействие путем разгрузки части когнитивной нагрузки взаимодействия человека с роботом. Таким образом, это геометрический аналог планировщика символических задач HATP: он может использовать набор социальных правил для адаптации геометрических планов к социальным взаимодействиям.
Интерактивное заземление
Это первое исследование основано на предыстории «домашнего переезда»: два пользователя перемещают свои вещи в другой дом и им нужна помощь робота для упаковки. Джидо , мобильный манипулятор с одной рукой, наблюдает, когда они переносят коробки (рисунок 6 ), и отвечает на вопросы, касающиеся расположения конкретных объектов. В этом исследовании основное внимание уделяется мультимодальному интерактивному заземлению: робот наблюдает, строит и поддерживает знания о перспективах и возможностях своих партнеров-людей, но фактически не выполняет никаких физических действий, кроме словесного взаимодействия и простых движений головы.
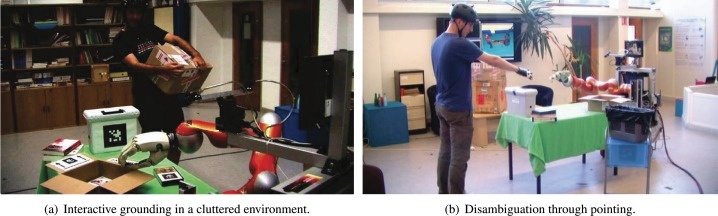
Рисунок 6. Сценарий, включающий мультимодальное интерактивное заземление: люди могут ссылаться на невидимые или неоднозначные объекты, которые роботы привязывают к физическим объектам посредством мультимодальных взаимодействий с пользователем.
Продолжение следует...