Ученые разработали всасывающий узел, который можно использовать на неровных поверхностях, независимо от того, насколько он текстурирован, который находит применение в разработке роботов-скалолазов и роботов-манипуляторов с захватными возможностями.
Традиционные методы вакуумного всасывания и предыдущие вакуумные всасывающие устройства не могут поддерживать всасывание на шероховатых поверхностях из-за утечки вакуума, что приводит к отказу всасывания.
Исследователи Синь Ли и Кайге Ши разработали метод разности нулевого давления (ZPD), чтобы улучшить разработку вакуумных отсосов. Их метод преодолел ограничения утечки, используя высокоскоростное вращающееся водяное кольцо между поверхностью и присоской для поддержания вакуума.
«Существует множество приложений нашего дизайна, но мы думаем, что робот для лазания по стенам будет самым полезным», - сказал Ли. «Робот с нашим всасывающим устройством на основе ZPD достигает удивительного улучшения производительности».
Центробежная сила вращающейся воды устраняет перепад давления на границе вакуумной зоны, чтобы предотвратить утечку вакуума. Он может поддерживать высокое вакуумное давление внутри присоски.
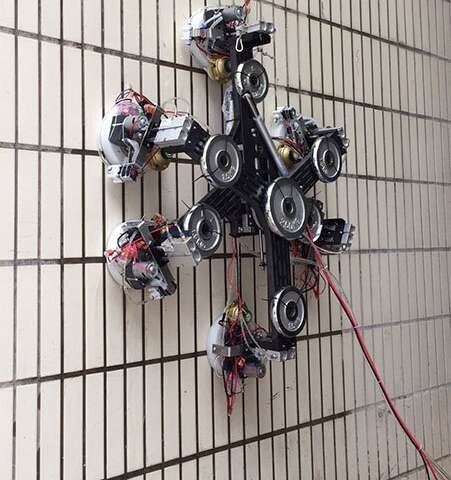
Их всасывающий агрегат ZPD является энергоэффективным, он меньше и легче, чем традиционные всасывающие агрегаты. Исследователи проверили свое устройство с тремя различными размерами всасывания и применениями: на роботизированной руке для захвата и перемещения объектов, на роботе для скалолазания с шестигранной головкой и в виде устройства-паука.
«Следующим шагом в этом исследовании является сокращение потребления воды. Если потребление воды может быть уменьшено, отсасывающая установка будет работать очень долго с небольшим количеством воды, так что робот, взбирающийся на стену, сможет нести собственную воду вместо быть подключенным к источнику питания ", сказал Ли.



















