ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ РОБОТОВ
Робот
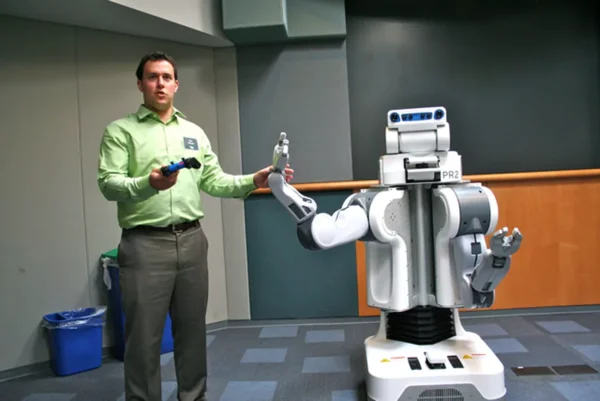
Для телеприсутствия использовался робот RobAIR Social Touch. Он использует архитектуру ROS, а интерфейс телеконференций основан на WebRTC. В отличие от большинства телеприсутствующих роботов, он не выглядит как экран на колесах, а ближе к слегка антропоморфному роботу с планшетным компьютером. По обе стороны "головы" робота расположен один всенаправленный микрофон. Сигналы, записанные обоими микрофонами, оцифровываются с помощью аудио-интерфейса и передаются в наушники R для воспроизведения псевдобинаурального слуха. Голос R излучает громкоговоритель, который помещается под планшетный компьютер.
Отмена эха
Был использован локальный беспроводной маршрутизатор, поэтому задержка в сети была незначительной. Однако визуальные и голосовые сигналы не могут передаваться приложениями мгновенно. Немного, получили задержку из голоса в слух около 150 мс, что довольно хорошо в соответствии с телекоммуникационными стандартами. Эта задержка, однако, означает наличие эхо-эффекта: пилот R может слышать свой голос, издаваемые динамиками робота и записываемые его микрофонами. Этот эхо-эффект может сильно повлиять на качество связи, поэтому, использовался алгоритм эхо-аннулирования. Он заключается в том, чтобы просто уменьшить громкость наушников во время разговора и ожидание в 150 мс, прежде чем вернуться к обычному уровню громкости.
Источники шума
В качестве источников звука (шума) мы использовали две акустические системы (колонки). Одна из них была установлена рядом с кофеваркой в коридоре, прилегающем к комнате "Р". Она распространяет усиленную аудиозапись запуска кофемашины (условие B). Другая колонка, была помещена в помещение рядом с комнатой Л и распространяла буровые шумы (условие D), предварительно записанные микрофонами робота (условие C). Оба источника звука были откалиброваны на 55 дБ(А) с помощью датчика уровня звука, установленного в месте нахождения объектов. Кроме того, местное пространство было особенно реверберирующим, со временем реверберации около 0,8 с.
Записи и калибровка
Голоса обоих субъектов были захвачены двумя беспроводными микрофонами и оцифрованы с помощью аудио-интерфейса. Сигнал R был отправлен в L через громкоговорители робота. Однако сигнал L использовался только для измерения. То, что R слышал о местном пространстве, было записано микрофонами робота. Кроме того, были также записаны сигналы внутреннего микрофона компьютера, а также сигнал монитора.
Наушники, которые носил пилот R, были AKG K242. Они были откалиброваны с помощью искусственного уха, чтобы звуки, воспринимаемые R, были такими же громкими, как и в комнате объекта L. Шумо-поглощение через эти наушники незначительные. Громкоговоритель робота также был откалиброван с помощью измерителя уровня звука, чтобы гарантировать, что громкость голоса R передается точно.
АНАЛИЗ РЕЗУЛЬТАТОВ
В эксперименте приняли участие 14 групп из 2-х человек. Большинство из них были носителями французского языка (25/28), двое свободно владели французским языком и один имеет базовый уровень, но достаточный для чтения вопросов. Шумовые последовательности были аннотированы, и мы извлекли каждое ключевое слово, на которое ответил субъект R (например: "зеленый"), и каждый шаблон вопросов, читаемых субъектами L (например: "Каков цвет...?"). Мы изучали только те ключевые слова/вопросы, которые повторялись не менее 50 раз среди всех тестов.
Запись фильтровалась с помощью цифрового фильтра взвешивания А, интенсивность речи рассчитывалась по сегментам длиной 20 мс. Глобальные результаты по максимальной интенсивности. Однако эти результаты скрывают большую вариативность между субъектами и между ключевыми словами/вопросами, которые могут исказить анализ. Действительно, количество каждого ключевого слова в каждом условии варьируется от эксперимента к эксперименту, поскольку ответы субъекта R не ограничены. Поэтому для того, чтобы правильно количественно оценить различия между каждым условием, мы применили модель линейного смешанного эффекта с R. Этот метод позволяет построить очень простую модель на основе данных и в то же время обеспечивает измерение статистической значимости.
Наиболее интересный результат, касается разницы между состоянием С и D. Объект R слышал одинаковые звуки в обоих условиях, но их увеличение интенсивности было больше в состоянии D, когда объект L также мог слышать шум и адаптироваться к нему. Это может подчеркнуть эффект увлечения: субъект R увеличил интенсивность своего голоса не только из-за шума, но и потому, что его собеседник L говорил громче. Однако этот эффект не наблюдался у испытуемого L, который не увеличивал интенсивность своего голоса в состоянии B и C. Это может быть объяснено характером их задачи (чтение) или тем, что они не могли слышать шум, который заставлял их собеседников говорить громче.
ВЫВОД
Для изучения ломбардного эффекта в контексте роботов мы провели эксперимент с парами субъектов (R и L), сфокусированный на задаче вопрос/ответ. Были протестированы четыре шумовых условия: A - без шума, B - только R слышит шум, C - только R слышит шум над наушниками, D - R и L слышат шум. Шумовые явления были очень короткими и воспринимались участниками как случайные. Однако всякий раз, когда они слышали шум, у них была тенденция говорить немного громче. Эффект увлечения был также отмечен у субъекта R, который говорил громче, когда L мог также слышать шум. Такое увеличение интенсивности голоса, будучи очень тонким, легко может быть ошибочно принято за выразительные вариации, указывающие на социальные последствия. Дальнейшая работа будет включать сравнение высоты тона и продолжительности вокальных произведений в четырех различных шумовых условиях.