Введение
Использование стационарных и анимированных, роботизированных моделей животных знает давнюю традицию. Такие модели использовались в таких разнообразных контекстах, как, например, сигнализация притяжения, взаимодействие хищник - добыча или сотрудничество для исследования того, какие стимулирующие свойства вызывают реакции у животных. Технологические достижения, связанные с новыми материалами, малыми приводами, технологиями 3D-печати и увеличением вычислительной мощности, значительно расширили возможности нового поколения еще более реалистичных роботизированных моделей животных, которые могут вывести изучение сигналов связи животных на новый уровень, особенно в контексте мультимодальной сигнализации. Эта форма сигнализации, когда сигналы в одной модальности либо факультативно, либо обязательно сопровождаются сигнализацией в одной или нескольких дополнительных модальностей, широко распространена у животных, особенно в контексте привлечения партнера: Птицы поют и танцуют, млекопитающие показывают визуальное отображение, акустические и химические сигналы, многие насекомые сочетают акустическую, вибрационную и химическую сигнализацию. Однако эти сигналы обычно изучаются только в одной форме, часто из-за технических проблем, связанных с контролем более чем одной формы в ходе презентаций стимулов. Роботизированные модели позволяют управлять мультимодальными сигнальными компонентами независимо друг от друга. Это позволяет расширить диапазон стимулов и создавать комбинации искусственных стимулов, тестирующих реакцию приемников на различные комбинации компонентов сигнала. В данной статье, рассказывается о прогрессе в проектировании роботизированной птицы, выглядящей и поющей, как птица-песенник, вьюрок зебра.
Создание 3D Модели
Для разработки базовой формы RoboFinch было проведено 3D сканирование таксидермической модели зебрового вьюрка с помощью ручного 3D сканера. Клюв был отсканирован с высоким разрешением. Эти сканы были объединены в программе, где также была реализована внутренняя механика. Было напечатано RoboFinch со стереолитографической 3D печатью, которая использует лазер для отверждения твердых изотропных частей из жидкой фотополимерной смолы. Движение головы и клюва контролировалось катушками, которые были получены от демонтажа DigiBirds (Серебряная фабрика игрушек). Преимущество использования этих катушек заключается в том, что они являются экономичными, малыми и позволяют выполнять быстрые перемещения до 100 Гц.
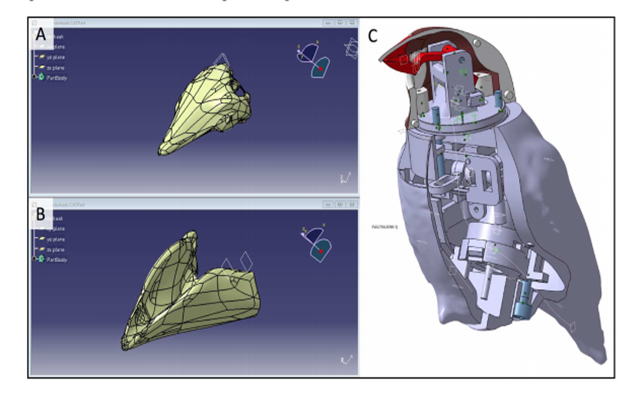
Управление катушками осуществлялось с помощью специальной платы контроллера сборки. Все движения и звук контролировались с помощью карты сбора данных (измерительные вычисления USB-3101), которая была подключена к небольшому настольному ПК. Для создания файлов движения мы сделали высокоскоростные видеозаписи (120 кадров в секунду) пения самцов вьюрков, вывели их движения головой и клювом с помощью программного обеспечения трекера и воспроизвели записанные движения на роботе. Соответствующий звук воспроизводился через громкоговоритель, расположенный рядом с роботом.
Применение в репетиторской ситуации
Была протестирована приемка робота, с двумя группами молодых зебровых вьюрков, от 45 до 75 дней после рождения, каждая группа состояла из одного самца и одной самки. Установка состояла из большой клетки, с черной стеной с одной стороны. Черная стена имела сетчатое окно (20 x 15 см), робот был размещен непосредственно за этим окном, а птицы внутри клетки могли сидеть прямо у этого окна. Птицы привыкли к неподвижной модели робота около 12 часов (днем и ночью), а на следующее утро (8 утра) робот начал двигаться впервые. Робот был запрограммирован на движение 6 раз в день по полчаса, отображая движения головы и клюва, связанные с короткими звонками и песнями.
Наблюдение за птицами, осуществлялось с веб-камер (10 кадров в секунду), были записаны их поведение и образцово проанализированы последовательности видео-кадров (600 кадров в оттенках серого, 1 мин) до и после начала движения робота. Было сделано это в течение двух сессий в день в течение шести первых дней. В качестве меры перемещения, использовался метод разницы кадров, вычислили среднюю разницу между соседними кадрами. До начала движения робота, молодые птицы двигались преимущественно в горизонтальном направлении, указывая на то, что птицы не особенно интересовались роботом, когда он не двигался и не пел.
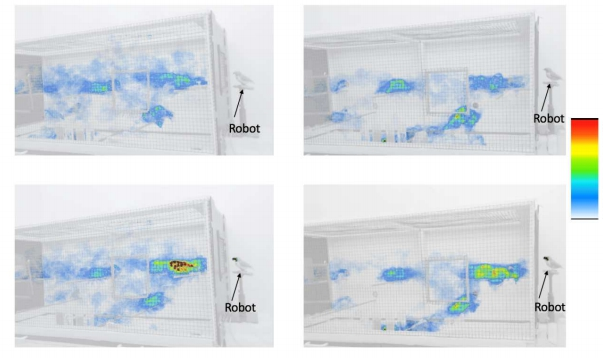
Изображения экспериментальных клеток, двух экспериментальных групп молодых птиц, резюмирующие их перемещения в клетке с рамкой, различаются. Мы нарисовали разницу в цветовой градации рамки, чем темнее красный цвет, тем сильнее были кумулятивные различия пикселей соседних рамок и тем сильнее было движение. Каждый из четырех сюжетов базируется на 12 событиях (2 тьюторства на каждый из 6 первых дней экспозиции) и для каждого события мы проанализировали 600 кадров (60-е, 10 кадров в секунду). Изображения, приведенные выше, основаны на последовательностях прямо перед тем, как робот переместился и озвучил, внизу сразу после того, как робот начал двигаться и вокализировать. Обратите внимание, что движение робота также видно на нижних изображениях в виде темных точек.
Однако, как только робот начал двигаться и вокализировать, птицы проявили больший интерес и приблизились к роботу, что видно по зеленому и темно-красному пикселям ближе к роботу. Во время репетиторства, во время чувствительной фазы изучения песни, робот оставался вне клетки, но на 74 и 75 день мы также протестировали прием робота в клетку и заметили птиц, взаимодействующих с ним, в частности, на всех этапах его движения и пения.
Заключение
Данная работа развивает и дополняет предыдущие работы, предполагая, что роботизированные модели помогают раскрыть роль визуальных подсказок в изучении песен зебровых вьюрков. По крайней мере один поведенческий эксперимент с зебровыми вьюрками и неподвижным роботом показал, что птицы вокально взаимодействуют с этой моделью. Кроме того, пластмассовые модели уже используются в качестве репетиторов в экспериментах по изучению песен зебровых вьюрков.
Предварительные данные показывают, что робот-птица воспринимается молодыми зебровыми вьюрками практически мгновенно и взаимодействует с ними. Эти наблюдения позволяют предположить, что робот может быть успешно использован для проведения экспериментов по репетиторству песен. Поскольку теперь можно самостоятельно контролировать визуальные и акустические стимулы и выяснять, как их сочетание может повлиять на обучение вокалу. Данные эксперименты могут помочь раскрыть общие принципы мультимодальной сенсорной интеграции в общение с животными.