В прошлой статье поднимались важные вопросы, ответы на которые дадут понимание, как встроить эмоции в социальные модели роботов и, разумеется, любые вопросы требуют ответов. Начнем с эмоциональных моделей.
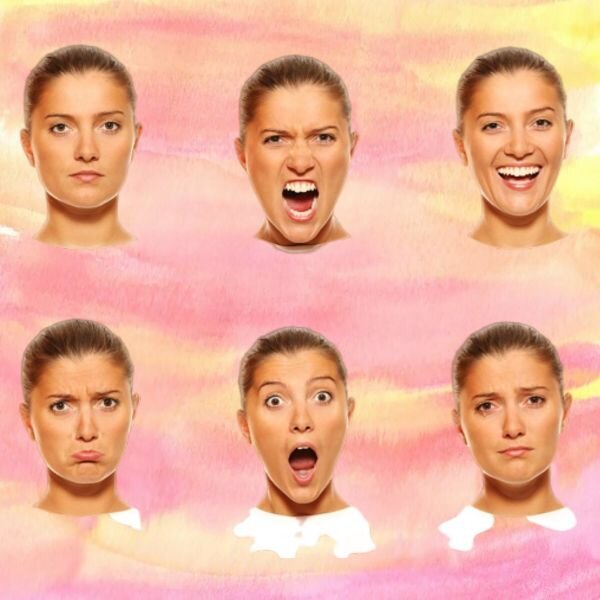
Для того чтобы в робота была заложена возможность распознавания эмоций, необходимо понять, как их представить. В большинстве работ по социальной робототехнике представление эмоций имеет две основные теории. Наиболее известная теория была предложена Экманом и Фризеном. По их мнению, каждое эмоциональное выражение можно разделить на одну из шести основных категорий: гнев, отвращение, страх, счастье, печаль и удивление, плюс нейтральное состояние. Позже они добавили другие эмоциональные состояния (веселье, презрение, удовлетворенность, смущение, возбуждение, вину, гордость, облегчение, удовлетворение, удовольствие, стыд), называемые вторичными эмоциями.
Однако при распознавании эмоций учитываются только шесть исторически признанных эмоций по двум основным причинам. Первая из них тесно связана с тем, что конкретизировать несколько классов эмоций сложно технически. Вторая причина кроется в сложности их вычисления и распознавания. Экман заявил, что их следует рассматривать как независимые состояния души. В заключительном выражении эмоций такие черты, как наборы микролицевых выражений, связанных с каждой отдельной эмоцией, могут, конечно, перекрываться другими эмоциями.
Другая школа мысли связана с теорией Рассела. Он утверждал, что эмоции могут быть получены в эмпирических разрезах плоскости, состоящей из двух основных координат: валентности, придающей положительный или отрицательный оттенок эмоциональному состоянию, и возбуждения, измеряющего интенсивность чувства. В итоге он также определил несколько эмоциональных состояний. Таким образом, чтобы избежать непропорционально большого количества эмоций для обработки, по вышеупомянутым причинам, рассматриваются шесть исторических эмоций, первоначально упомянутых Экманом. Причина, по которой теория Рассела предпочтительнее теории Экмана, заключается в ее лучшей пригодности для решения проблемы классификации, благодаря косвенной ссылке на проблему разделения гиперплоскостей.
Несколько исследовательских групп решили следовать разным схемам, вдохновленным двумя описанными здесь. Например, Колестра и Патрас решили смоделировать пространство эмоций, добавив, помимо возбуждения и валентности, третье измерение, называемое контролем, которое относится к способности человека справляться с эмоциями. Банда и Робинсон. использовали третье дополнительное измерение к модели Рассела, называемое стойкой, в поведенческой модели робота Кисмет. Это основано на теории Мехрабяна о модели УВД (удовольствие, возбуждение, доминирование).
Кроме того, другие эмоциональные модели в литературе могут быть использованы в качестве вдохновения для создания проблемы распознавания эмоций у роботов. К ним относятся песочные часы эмоций, также известные как модель Плутчика. Кроме того, следует поощрять поиск новых моделей в области нейронауки. Однако использование категорических эмоций в процессе классификации начало пересматриваться, поскольку этот подход имеет ряд ограничений. Льюис и Канамеро утверждают, что эта классификация может привести к ошибкам в тех случаях, когда очень разные движения представляют одну и ту же эмоцию. Это опосредовано ситуацией, в которой происходит распознавание эмоций. Это также может зависеть от личности человека.
Последний аспект был рассмотрен Энрикешем, настроив взаимодействие своих роботов на основе профиля пользователя в соответствии с теорией Майерса-Бриггса. Эта теория утверждает, что в мире существует 16 личностей, которые отличаются друг от друга отношением, функциями восприятия и суждения, образом жизни.
Однако, даже если бы робот мог прекрасно понимать человеческие эмоции, этого было бы недостаточно для достижения полной социальности робота. Поскольку он должен быть компаньоном, ему крайне необходимо выстраивать долгосрочные отношения, которые не рассматриваются в моделях, описанных до сих пор. Наличие внутренних моделей роботов, которые учитывают такие взаимосвязи, сильно повлияло бы на социальную навигацию. Например, если робот постоянно связывает одного и того же человека с положительными эмоциями, он может счесть ситуацию менее рискованной, чтобы быть ближе к нему, прежде чем представлять себе эмоции от человека.
Кроме того, робот может вести себя по-разному в зависимости от допустимого расстояния до пользователя. С этой целью следует рассмотреть возможность проведения подробных исследований по вопросу о проксимити. Если эмоции были связаны с отвращением, робот мог попытаться избежать его. Рэйчел Кирби создала робота, в котором моделировались настроение и отношение, а также эмоции. В ее работе, настроение было задумано как модулятор интенсивности эмоций, которые испытывает робот, вызванный определенным событием. В зависимости от события, это настроение со временем исчезает с разной скоростью. Установка была смоделирована как долгосрочное настроение, связанное с человеком. Она не должна быть так легко уничтожена, чтобы отношение было последовательным.
Это ключевая концепция: результат процесса принятия решений, реализованного в роботах, может радикально измениться в зависимости от внешних условий окружающей среды
Например, если человек боится смотреть фильм ужасов, робот не должен бояться распознавать выражение страха. Эта концепция была отмечена Льюисом и Канамеро и точно рассмотрена в работе Раймундо В частности, они различали контекст и ситуацию.
Системы, учитывающие контекст, сосредоточены на характеристике окружающей среды, в то время как системы, осведомленные о ситуации, пытаются определить, когда некоторые организации находятся в соответствующем состоянии, чтобы вмешаться. Это говорит о правильном подходе к моделированию представления контекста.