Предыдущая статья...
Лазерные методы
Система контроля тоннелей, разработанная компаниями Euroconsult и Pavemetrics, основана на использовании камер и лазерных датчиков, которые позволяют сканировать стенки тоннеля со скоростью до 30 км/час. Программное обеспечение системы также позволяет быстро сравнивать данные двух различных инспекций и оценивать структурные изменения и дефекты облицовки стен.
Измерительные датчики для обследования состояния устанавливаются на грузовике, способном передвигаться по рельсам и ровной местности
Транспортное средство включает в себя все системы, необходимые для безопасного движения по дорогам и железным дорогам (индикатор занятости полосы движения, регулятор скорости, электропитание для всех систем, сигнальное оборудование и т.д.). Он может вмещать до шести лазерных камер. Каждая пара лазерных камер обследует участок шириной 2 м с точностью до 1 мм. С помощью шести камер туннели диаметром 9 м могут быть проверены с максимальным разрешением системы.
Система, разработанная Н. Сано, состоит из машины для обнаружения трещин, оснащенной лазерными датчиками и CCD-камерами. Автомобиль проезжает через туннель под наблюдением оператора, и камеры делают снимки стен туннеля. Изображения, полученные камерами, объединяются в единую карту поверхности туннеля. После получения карты специальное программное обеспечение распознает трещины в ней.

Методы бурения
Система проверяет наличие пустот за облицовкой путем сверления отверстий с помощью механизированного крана.
Дополнительные примеры систем, работающих с японскими тоннелями, можно найти в работе Тосихиро Асакуры и Йосиюки Кодзимы, в которой показаны технологии технического обслуживания и типичные случаи деформации японских железнодорожных тоннелей, а также некоторые методы обследования и диагностики. Примеры методов проверки включают испытание молотком на облицовке (в данном случае оператором), измерение трещин в облицовке тоннеля с помощью линейных датчиков, установленных в транспортном средстве на рельсах, и исследование поверхности облицовки тоннеля с помощью инфракрасной камеры и CCD-камер.
Очистка тоннелей
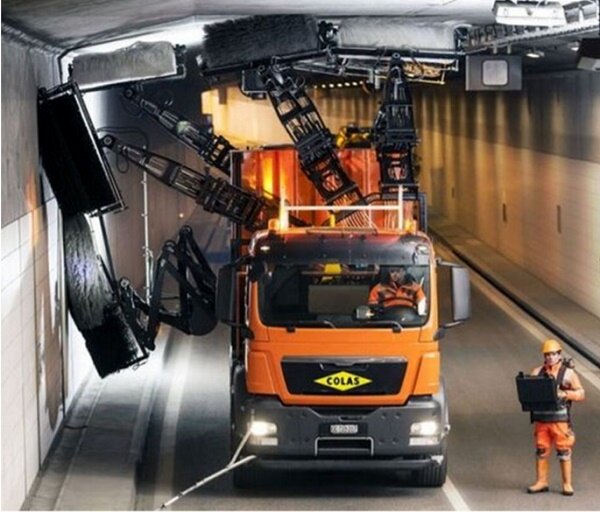
Примером системы технического обслуживания туннелей является роботизированный грузовик-мойка. Поддержание чистоты просто необходимо для предотвращения будущих возможных повреждений. Он был разработан инженерами компании Colas, Швейцария, в сотрудничестве с операторами дорожных сетей.
Эта система очистки туннелей состоит из стандартного коммерческого грузовика, оснащенного восемью механическими кронштейнами с различными типами щеток. Кронштейны и щетки оснащены гидравлическими приводами, которые обеспечивают движение и поток воды для процесса очистки.
Механические рычаги могут по разному устанавливаться для адаптации к различным геометриям туннелей. Это достигается с помощью системы, похожей на кейс для связи, управляемой оператором рядом с грузовиком. Второй оператор необходим для управления погрузчиком со скоростью 2 км/ч, пока стены тоннеля очищаются щетками. Система может работать в туннелях максимальной высотой 7,66 мм. Только половина участка туннеля покрывается каждый раз, без блокировки движения на свободных полосах.
GPR-методы
Другим коммерческим примером является IRIS, построенная компанией Penetradar. Система основана на георадарном датчике, смонтированном в телескопическом узле спереди автомобиля Hyrail (например, транспортного средства, способного передвигаться по дороге и рельсам). Устройство позиционирования GPR может поворачиваться для закрытия боковых и верхних стен туннеля, а штанги моторизированной стрелы могут быть втянуты, чтобы избежать помех. Penetradar предоставляет специализированное программное обеспечение для сбора, обработки и отображения GPR данных.
Маленькие туннельные роботы
Когда туннели, которые необходимо осмотреть, имеют меньшие размеры, например подземные туннели, используемые для прокладки кабелей, использование роботизированных платформ является более чем целесообразным. В этом сценарии небольшие мобильные роботы с телеуправлением могут выполнять проверки, предоставляя визуальные данные и данные о концентрации некоторых ядовитых газов и тд.
К примеру телеуправляемый робот (420 мм длиной, 320 мм шириной и 300 мм высотой) может работать в тоннелях шириной 1 м, перемещаться со скоростью 24 м/мин и имеет автономность 2 часа. Система датчиков включает в себя камеру с панорамным наклоном, инклинометр, гироскоп, газовые датчики (CO, CH4, CO2 и O2), термометр, ИК-датчики расстояния и ультразвуковые датчики.
В других случаях кабели прокладываются не внутри небольших туннелей, а вдоль более крупных, расположенных на стенах. Учитывая это, Songyi Dian спроектировал робота в форме креветки с шестью колесами, способного проходить по силовым кабелям тоннеля при проведении осмотра. К сожалению, эта работа носит лишь теоретический характер и физически робота не существует.
Другим типом небольших тоннелей являются вентиляционные туннели
В 2003, 2009 и 2011 годах Р. Миничан разработал три различных мобильных робота для осмотра вентиляционных туннелей на объекте H-Canyon. Из-за токсичности окружающей среды туннелей, только робот может выполнять процесс проверки. Управление роботами осуществляется дистанционно, и система была подключена через длинный трос к станции управления. Инспекция состояла в визуальной оценке с использованием изображений, полученных с помощью роботизированных камер.
Однако не все туннели предназначены для перевозки транспортных средств, людей или кабелей. Управление водораспределением также осуществляется через туннели, и для проверки такого рода сооружений необходимо использовать различные решения. В этом сценарии альтернативой мобильным колесным роботам являются автономные подводные транспортные средства (AUV) и дистанционно управляемые транспортные средства (ROV), которые могут использовать гидролокационные датчики для проверки.