Было предложено и реализовано множество различных подходов к вспомогательной робототехнике. Если в некоторых ситуациях (например, в профессионально-технических учебных заведениях) подходит стационарное рабочее место, то в других случаях (например, независимое проживание в собственном доме) мобильное устройство является более подходящим.
Недавно был реализован недорогой мобильный робот-манипулятор, установленный на базе простой тележки без питания, который можно было перемещать по дому с помощью человека. Для того, чтобы расширить гибкость этой системы, тот же манипулятор теперь установлен на электрическом кресле-каталке.

Спецификация
Во многих опросах сообщалось о различных задачах, для которых пользователь с ограниченными возможностями может использовать вспомогательного робота.
Можно кратко разделить задачи на группы:
- Еда и питье
- Личная гигиена
- Работа
- Отдых
- Мобильность
Многие из этих областей являются общими для всех вспомогательных роботизированных систем. Однако некоторые задачи более подходят для стационарного рабочего места, возможно, для профессионального применения, в то время как другие более специфичны для установки роботов на кресла-каталки.
Эти задачи включают в себя как общие задачи, так и более специфические задачи, связанные с мобильностью, такие как открытие дверей и окон и управление выключателями (например, выключателями освещения, кнопками вызова лифта).
В ходе бесед с пользователями были выявлены некоторые конкретные требования и ограничения, связанные с манипулятором на кресле-коляске:
Он должен быть в состоянии:
- Дотянуться до уровня пола;
- Дотянуться до высоты головы.
Описание конструкции
Вертикальный привод и монтаж инвалидной коляски. Вертикальный привод и его крепление к инвалидной коляске являются наиболее важными аспектами. Был использован выдвижной механизм, который в своем припаркованном положении не выдвигается заметно выше высоты головы.
Механизм базируется на двух параллельных вертикальных направляющих, соединенных шкивом. При перемещении подвижной части электропривода вверх, относительно неподвижной секции, точка крепления верхнего рычага перемещается вверх по отношению к подвижной секции. Две постоянные натяжные пружины уравновешивают вес плеча, так что маленький двигатель может поднять всю руку.
Манипулятор смонтирован на шарнирной точке крепления к задней части коляски, позволяя при необходимости поворачивать манипулятор вперед. Использование шарнирного крепления требует слишком большого зазора сбоку инвалидной коляски, что часто невозможно в маленьком помещении. Поэтому манипулятор установлен в фиксированном положении над задними колесами.
Верхнее плечо
Основная конструкция плеча скопирована с предыдущего манипулятора, установленного на тележке. Основные вращающиеся головки (плечевые, локтевые и лучезапястные) перемещаются в горизонтальной плоскости. Вертикальное движение исходит от вертикального привода. На запястье имеются движения крена и угла продольного наклона.
Двигатели монтируются внутри модулей, которые легко снимаются для технического обслуживания. Косметические чехлы также переработаны для облегчения снятия и улучшения эстетики.
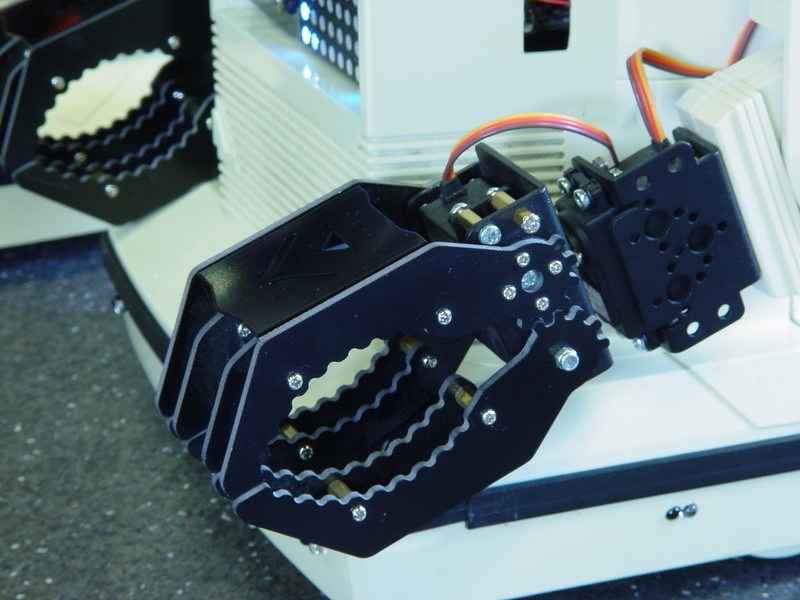
Захват
Специально разработанный захват разработан специально для данного устройства. Он имеет следующие особенности:
- Две параллельно движущиеся челюсти.
- Тонкий профиль обеспечивает хорошую видимость захватываемого предмета.
- Соответствующие требованиям элементы в приводной передаче позволяют осуществлять захват с переменным усилием.
- Бесступенчатая коробка передач и соответствие нормативам для сохранения силы захвата при отключении питания от приводного двигателя.
Электроника
Конструкция электроники основана на последовательном канале I2C, проходящем по всей длине манипулятора. Одноплатный процессор, совместимый с ПК, установленный на базе манипулятора, посылает командные сигналы на платы управления двигателем, установленные внутри манипулятора. На панелях управления, последовательный сигнал преобразуется в параллельный сигнал для фирменных микросхем управления двигателем. Управление двигателем использует широтно-импульсную модуляцию.
Интерфейс
Существует два основных подхода к проектированию пользовательского интерфейса вспомогательного робота.
- Отдать команду: Это хорошо работает в структурированной среде рабочей станции, но может оказаться менее подходящим в неопределенных условиях.
- Прямое управление: Это позволяет пользователю управлять манипулятором в неопределенной среде. Тем не менее, он предъявляет более высокие требования к пользователю, может отнимать много времени и быть утомительным.
Основной подход, используемый для робота, установленного на инвалидной коляске, заключается в прямом управлении, хотя существуют и функции, позволяющие легко перемещать манипулятор в определенные заранее заданные направления. Пользователи электрических инвалидных колясок, как правило, могут использовать двухступенчатый вход, либо обычный джойстик.
Использование джойстика двух степеней свободы обеспечивает интуитивно понятную форму управления манипулятором в режиме реального времени. Пользователь может использовать один и тот же джойстик для управления инвалидной коляской и манипулятором.