Приходится констатировать, что классический подход в проектировании крыльев летательных аппаратов самолетного типа на текущий момент технологически себя исчерпал и не позволяет существенно повысить их аэродинамические свойства и улучшить взлётно-посадочные характеристики. Механизация крыла, в виде выдвижных элементов не позволяет достичь больших значений максимального коэффициента подъемной силы при меняющихся режимах полета. В связи с чем, в последние годы, с развитием технической базы и появлением новых авиационных материалов, специалисты всё большее внимание обращают на возможность улучшения летных характеристик самолёта за счёт изменения геометрии крыла, в зависимости от режима полёта, без нарушения целостности его поверхности, т.е. ориентируются на использование адаптивного крыла [1]. То, что тенденция к созданию летательных аппаратов, в полете меняющих свои геометрические характеристики, с сохранением гладкости поверхностей, находит своё практическое воплощение уже в наши дни, мы можем видеть на примере поисков практических решений данной проблемы со стороны NASA[2], Boeing, Airbus Industrie, FlexSys[3], Festo и др.
Предметом данной статьи является знакомство читателей с принципом и устройством мехатронного узла, а также, с конструкцией каркаса адаптивного крыла, реализованной с его применением.
В основе предлагаемой нами конструкции каркаса адаптивного крыла лежит мехатронный узел, который призван обеспечить заданный угол между элементами в структуре адаптивного крыла, согласованное управление которыми позволяет изменять геометрию крыла с учетом аэродинамических и технологических требований.
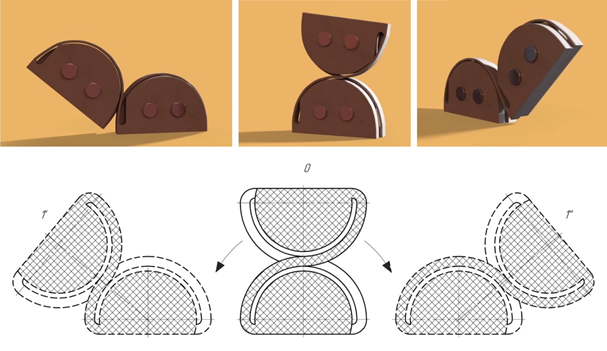
Мехатронный узел представляет собой последовательное объединение цилиндрических шарниров двойного действия (compliant rolling-contact D-CORE) [4], [5] (рис. 1), вписанных в контур профиля крыла (рис. 2) с приводом (рис. 3, 4).
Для конструкции D-CORE как механического узла характерно наличие упругих взаимообратных связей и непрерывно изменяющаяся ось вращения.

Управление мехатронным узлом осуществляется путем натяжения и ослабления тяги, переброшенной через шкив, связанный с валом сервопривода (рис 3 и 4).
Предложенная на рис. 3 конструктивная схема может быть изменена на варианты с использованием электромеханических, пьезо-, пневматических и гидравлических актуаторов, а также «материалов с памятью» (с нитиноловой нитью [6]).
Как осуществляется управление кривизной профиля крыла можно видеть на рис. 5.
Расположение мехатронных узлов в структуре каркаса крыла должно наделять последнее свойствами, позволяющими плавно отклонять носовую и хвостовую части, изменяя, таким образом, кривизну вдоль размаха, в зависимости от высоты, скорости полёта и перегрузки, а также, полностью изменять форму всего крыла, в том числе, с возможностью приобретения крылом винтовой формы.
Крыло состоит из не менее двух мехатронных узлов, объединенных в единую конструкцию с помощью упругих стержневых элементов из углепластика и элемента жесткого объединения мехатронных узлов. Управление приводами согласовано при помощи электронной системы (рис.6).
Определенную техническую сложность представляет подбор материала обшивки крыла (рис.8). В качестве оптимального варианта нам видится использование силиконовых эластомеров.
Положенный в основу предлагаемого решения принцип управления геометрией крыла является частным случаем и может быть распространен на управление геометрией всего корпуса летательного аппарата.
СПИСОК ЛИТЕРАТУРЫ
[1] Адаптивное крыло [Электронный ресурс]. URL: dir.md/wiki/Адаптивное_управляемое_крыло?host=ru.wikipedia.org [дата обращения 05.06.2018].
[2] NASA'S MIGHTY MORPHING WINGS MAKE FOR MORE EFFICIENT FLYING [Электронный ресурс]. URL: https://www.wired.com/2016/11/nasas-mighty-morphing-wings-make-efficient-flying [дата обращения 05.06.2018].
[3] FlexSys Morphing Wing [Электронный ресурс]. URL: https://www.liveleak.com/view?t=fb6_1478428583 [дата обращения 05.06.2018].
[4] T. G. Nelson, R. J. Lang, S. P. Magleby, and L. L. Howell, "Curved-folding-inspired deployable compliant rolling-contact element (D-CORE)," Mechanism and Machine Theory, vol. 96, pp. 225-238, 2016.
[5] Larry L. Howell, Todd Nelson. Patent US20160177605A1, 2015. Deployable joint.
[6] Austin Taylor, Trent Slutzky, Leah Feuerman, Mable Fok, Zion Tsz Ho Tse, «Origami Endoscope Design for MRI-Guided Therapy» Published: 10 April 2017 by ASME International in 2017 Design of Medical Devices Conference 2017 Design of Medical Devices Conference; doi:10.1115/dmd2017-3352.
«Изобретательство» ISSN 2072-3067, №7, 2018г., стр. 34-38.