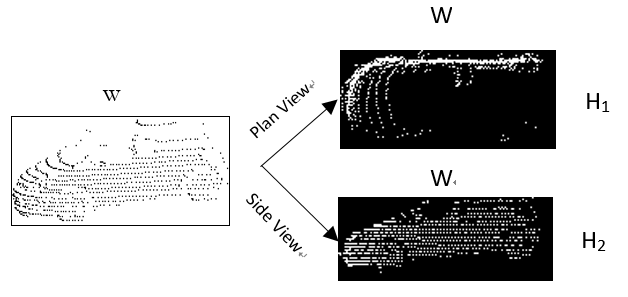
Преобразование: на этапе преобразования каждая группа транспортных средств, состоящая из трехмерных лидарных точек, преобразуется в двухмерное плоское изображение или изображение бокового обзора. Конструкция модели: каждый кластер облаков точек, полученных с помощью придорожного лазерного сканера, представляет собой участок транспортного средства. Если эти участки соединяются в соответствии с правильным соотношением между каждой последовательной парой изображений внахлест, будет построена агрегированная модель транспортного средства. Исходя из вышеизложенного, первое изображение берется в качестве опорного, затем остальные изображения преобразуются в ту же систему координат для построения модели, как показано на этапе построения модели на рисунке.
Для оценки точности будет проведено сравнение между моделью и целевым транспортным средством с точки зрения размеров. Регистрация изображения производится с помощью согласования шаблонов, которое определяет расположение шаблона внутри эталонного изображения, для расчета параметров преобразования между N-м и эталонным изображением, при этом шаблон смещается на все возможные места на эталонном изображении, пиксели за пикселями.
Исходя из практических соображений, что транспортное средство может менять свою ориентацию при смене полосы движения или повороте в любом смещенном месте, изображение шаблона поворачивается от -10 до +10 градусов с шагом в 1 градус, и для каждого поворота рассчитывается значение сходства. Наибольшее значение считается оптимальным значением сходства для данного местоположения. Оптимальное согласованное положение шаблона изображения - это место, где найдено наибольшее сходство, и соответствующее вращение считается лучшим вращением. Степень сходства между двумя изображениями, а именно значение балла, рассчитывается с помощью метрики коэффициента перекрестной корреляции. После завершения процесса поиска может быть сформирована карта баллов. Оптимальное совпадение отображается красной точкой.
Точка слежения от совпадения модели: в качестве точки слежения принимается центроид полученной модели транспортного средства. В связи с тем, что построенная модель агрегируется по каждому изображению, содержащему определенную часть транспортного средства в соответствии с параметром преобразования, необходимо согласовать относительное положение между отслеживаемой точкой и каждой частью транспортного средства на контрольном изображении. Точка слежения может быть возвращена к соответствующему изображению, если каждое отдельное изображение снабжено моделью через вторичное совпадение. Дальнейшее преобразование обратно в исходную лидарную раму может быть выполнено в обратном порядке в процессе преобразования.
Основное отличие в отслеживании бокового обзора от отслеживания в плане состоит в том, что на этапе преобразования кластеры транспортных средств преобразовались в боковые изображения вдоль траектории движения транспортного средства. Поскольку в период наблюдения целевое транспортное средство может менять направление движения, для обеспечения точного слежения за траекторией движения необходимо рассчитывать по кадрам ориентацию цели, вариант которой определяется для каждого снимка в режиме прослеживания плана. Если ориентация первой группы транспортных средств определена как "ориентация", то ориентация группы транспортных средств может быть определена путем сложения соответствующего угла поворота.
Ориентация первого кластера должна совпадать с ориентацией модели, поскольку модель построена на первом изображении. Для определения его ориентации края модели извлекаются с помощью оператора Canny, а затем линии определяются с помощью преобразования Hough. Направление самой длинной линии можно рассматривать как ориентацию первого кластера и, следовательно, модели.

Сравнение между различными методами.
1. Отслеживание точек и кластеров .
Использование средней точки кластера (которая является переменной в придорожном лазерном сканировании) в качестве точки слежения явно вызывает большие колебания, чем точечный подход.
2. Покадровое отслеживание и отслеживание на основе моделей.
Покадровое отслеживание выполняется просто: позиции точки находятся в двух последовательных кадрах на основе параметров преобразования, рассчитанных с помощью регистрации изображения на основе совпадения. Однако совпадение изображений приведет к ошибкам регистрации из-за их пошаговой обработки. Для минимизации этих случайных ошибок после агрегирования всех кадров на основе вычисленных преобразований строится модель. В этих двух случаях смещение длины между моделью и целевым транспортным средством находится в пределах 30 см. Учитывая разрешение изображения (0,03 м) и общее количество кадров слежения (100 в случае одного, 80 в случае двух), модель можно считать достаточно точной для дальнейшего использования. Точка слежения может быть расположена в кадрах после вторичного сопоставления их с моделью. Несмотря на схожесть картины, между этими двумя группами результатов наблюдается небольшое смещение.