Предыдущая часть
Другая причина трудностей в достижении результатов роботами заключается в том, что в большинстве проведенных исследований рассматривалось такое движения, при котором движение ротора или угол поворота колеса контролируется в прямом направлении
По мнению ученых, использование информации обратной связи является вполне приемлемым для достижения роботизированного управления в реальном мире с целью снижения влияния погрешностей параметров или немоделированного трения.
С другой стороны, исходя из конструктивного подхода робота, проф. Ванг рассказал о кинематической связи между вращением основы доски и ориентацией передних и задних колес.
В других исследованиях изучалось планирование движения, необходимое для достижения положения цели или фактической степени тяги, которую может достичь робот
Однако, насколько известно, ни одно другое исследование, кроме предыдущего, не показало робота с одним двигателем, способного двигаться, как змеиная доска. Фактически, в предыдущих работах этих исследователей одномоторная силовая установка была достигнута путем создания механизма с ограничителями крутящего момента и ограничителями крутящего момента.
Тем не менее, ограничитель крутящего момента был ключом к разработке и, будучи специальным устройством, было трудно спроектировать и изготовить его в одиночку. Таким образом, был предложен новый механизм без каких-либо специальных механических деталей.
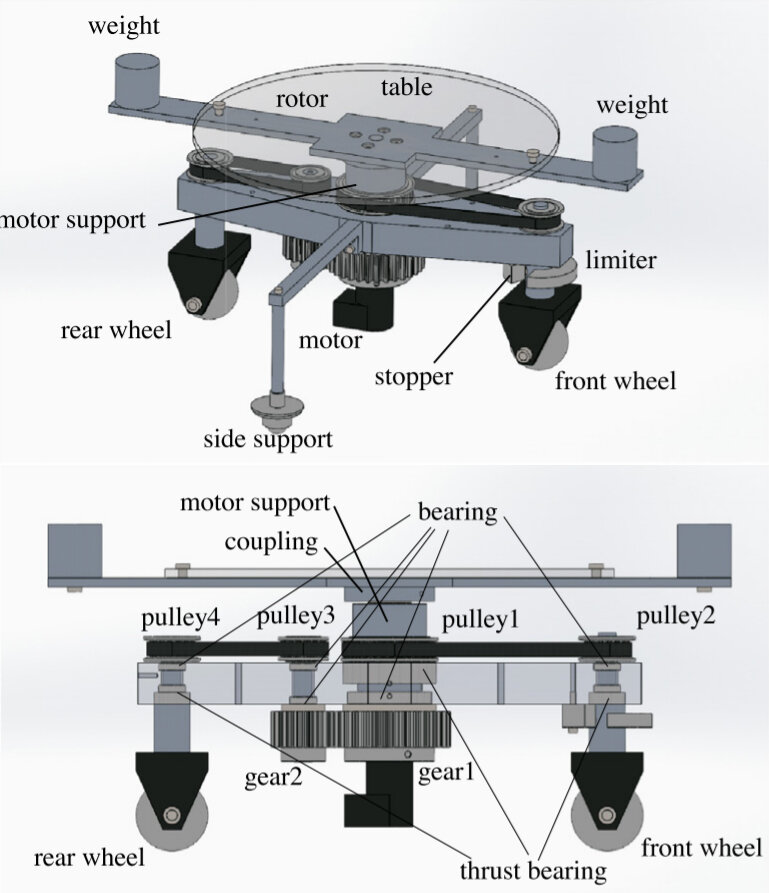
Применяя принцип движения двухколесного скейтборда или "змеиного щита", был создан мобильный робот с ротором и двумя пассивными сферическими колесами, одно спереди и одно сзади, ориентация которых регулировалась
Новинка механизма заключалась в том, что единственный двигатель, приводящий в действие ротор, прикрепляется к несущему корпусу с небольшим свободным люфтом, что приводит к некоторым отклонениям самого двигателя в результате действия противовеса вращению ротора. Это отклонение, вызванное встречным усилием, используется для одновременного изменения ориентации колес спереди и сзади. Механизм обеспечит дорогу к новой конструкции мобильного робота не только тем, что количество необходимого двигателя всего один, но и тем, что колеса все еще пассивны: мы можем легко толкать и тянуть их, не отсоединяя сцепление, в отличие от активной колесной системы. Он будет применим, например, к магазинной тележке: пользователь может свободно везти ее сам, но в случае необходимости может "сказать" ей передвигаться автономно.

Двигатель, основанный на этом механизме, был создан благодаря множествам анализов с использованием механической модели
Численный анализ также показал, что момент инерции ротора, максимальная ориентация колес, частота повторяющихся движений ротора и их комбинация должны рассматриваться для продления расстояния перемещения робота
Эксперименты с роботами подтвердили:
- механизм, изобретенный в этом исследовании, позволяет роботу двигаться вперед, используя синусоидальные вращения ротора;
- робот может поворачиваться, увеличивая или уменьшая смещение синусоидального движения ротора;
- обратная связь о положении робота позволяет роботу смело продвигаться к пункту назначения.
Первый проведенный эксперимент становится доказательством работоспособности принципа действия такого рода двигателя. Результаты второго эксперимента, безусловно, способствуют расширению маневренности этого механизма
Это означает, что корректировка скорости изменения синусоидального смещения позволяет планировать путь к точке назначения. Связь между скоростью изменения и кривизной траектории может быть рассчитана теоретически, но она будет зависеть, например, от скорости перемещения робота, и поэтому должна быть исследована экспериментально в реальных условиях применения. Последний эксперимент стал хорошей демонстрацией того, как робот со змеиной доской может эффективно передвигаться.
Полученные экспериментальные результаты способствуют созданию нового дизайна мобильного робота. В своей дальнейшей работе ученые продолжат изучение влияния пружины для дальнейшего повышения эффективности и применения этого механизма к системе с силовым приводом, способной фактически транспортировать груз.