Чтобы лучше понять нюансы искусственного интеллекта, важно сначала понять разницу между автоматизированной и автономной системой.
Автоматизированная система - это система, в которой компьютер объясняет причины по понятной структуре, основанной на правилах, и делает это детерминированно, означая, что для каждого входа выход системы всегда будет одинаковым (за исключением случаев, когда что-то не срабатывает).
Автономная система - это система, которая дает вероятностные основания для ввода набора входных данных. Это означает, что она делает предположения о наилучших возможных вариантах действий при вводе данных датчика. В отличие от автоматизированных систем, при одних и тех же входных данных автономные системы не обязательно каждый раз будут производить одно и то же поведение; скорее, такие системы будут генерировать ряд моделей поведения. Человеческий интеллект, как правило, следует последовательности, известной как цикл обработки информации восприятия-познания-действия, в котором индивиды воспринимают что-то в окружающем их мире, думают о том, что делать, а затем, взвесив все варианты, принимают решение.
ИИ запрограммирован на то, чтобы сделать нечто подобное. Что компьютер чувствует окружающий мир, а затем обрабатывает поступающую информацию с помощью алгоритмов оптимизации и верификации, выбирая действие, подобное человеческому.
Различие мышления между людьми и ИИ
Хотя существует много параллелей между человеческим разумом и искусственным интеллектом, так же существуют и резкие различия.
Каждая автономная система, взаимодействующая в динамичной среде, должна строить мировую модель и постоянно обновлять ее. Это означает, что мир должен восприниматься (или ощущаться через камеры, микрофоны и/или тактильные сенсоры) и затем реконструироваться таким образом, чтобы компьютерный "мозг" имел эффективную и обновленную модель мира, в котором он находится, прежде чем он сможет принимать решения.
Верность мировой модели и своевременность ее обновления являются ключом к эффективной автономной системе. Автономная навигация БПЛА, например, относительно проста, поскольку мировая модель, по которой она работает, состоит только из карт, на которых указаны предпочтительные маршруты, высотные препятствия и бесполетные зоны. Радиолокаторы дополняют эту модель в реальном времени, указывая, на каких высотах нет препятствий. GPS-координаты передаются на БПЛА, куда необходимо отправиться, при этом главная цель координатного плана GPS заключается в том, чтобы не допустить попадания самолета в бесполетную зону или столкновения с препятствием.
Для сравнения, навигация для беспилотных автомобилей намного сложнее. Автомобили не только нуждаются в схожих картографических возможностях, но и должны понимать, где находятся все близлежащие транспортные средства, пешеходы и велосипедисты, и куда все это поедет в ближайшие несколько секунд. Безводные автомобили (и некоторые беспилотники) делают это с помощью комбинации таких датчиков, как LIDAR (Light Detection And Range), традиционных радаров и стереоскопического компьютерного зрения.
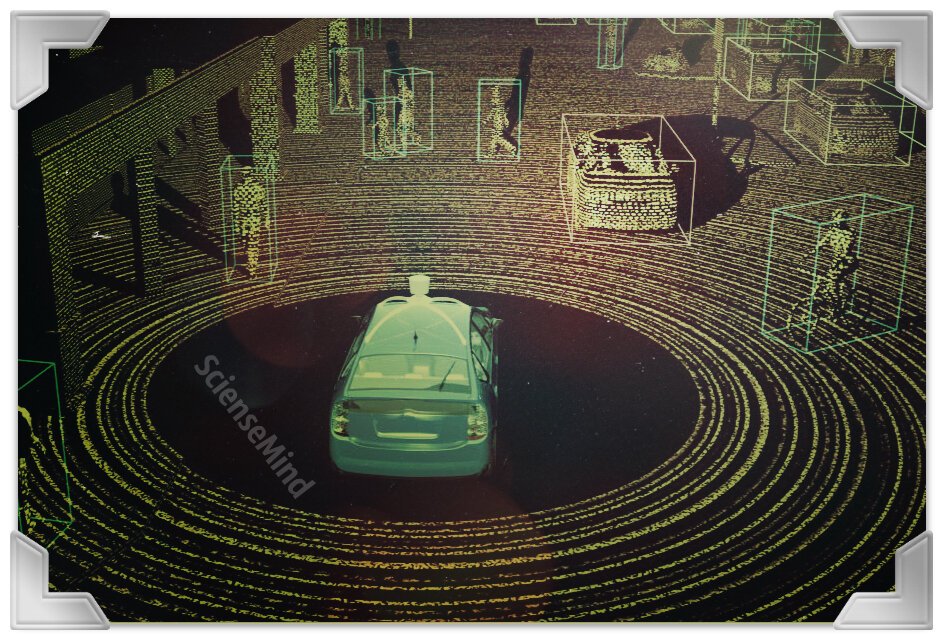
Таким образом, мировая модель беспилотного автомобиля намного более совершенна, чем модель обычного беспилотного летательного аппарата, что отражает сложность условий эксплуатации. Автомобильный компьютер без водителя должен отслеживать всю динамику движения всех близлежащих транспортных средств и препятствий, постоянно рассчитывать все возможные точки пересечения, а затем давать оценку.
Действительно, эта форма оценки или угадывания того, что будут делать другие движущие силы, является ключевым компонентом того, как люди управляют автомобилем, но люди делают это с незначительными когнитивными усилиями. Для отслеживания всех этих переменных, а также для поддержания и обновления своей текущей модели мира требуется значительная вычислительная мощность компьютера.
Учитывая эту огромную проблему вычислений, для того чтобы сохранить безопасное время выполнения действия, беспилотный автомобиль будет делать наилучшие догадки, основанные на вероятностных распределениях. По сути, поэтому автомобиль гадает, какой путь или действие лучше всего выбрать, учитывая некоторый доверительный интервал.
Наилучшие условия эксплуатации автономных систем - это те, которые способствуют созданию высокоточной мировой модели с низкой степенью неопределенности окружающей среды.
Спасибо, что дочитали статью :) Делитесь свои мнением в комментариях.
Хотели бы себе машину на автопилоте?