Строительная робототехника и автоматизация в Японии
Исследования и разработки в области японской строительной робототехники продолжались вплоть до начала 90-х годов. Ими руководили крупнейшие генеральные строительные компании. После краха экономического «пузыря» в середине 90-х годов исследования и разработки оставались в застое, и Lehman Shock в 2008 году ликвидировал это бездействие.
Массивное землетрясение и цунами в Тохоку и последующий взрыв на АЭС «Фукусима» нанесли ущерб всей японской деятельности. Конечно, строительная техника способна очищать и восстанавливать разрушенные дома, здания, инфраструктуры, но для обеспечения устойчивости поврежденной АЭС необходима в основном телеуправляемая строительная техника.
Исследования и разработки в области робототехники и мехатроники все еще активны. Свидетельством тому является то, что в спонсорстве IEEE участвует довольно много соответствующих научных собраний. В Японии проводятся собственные национальные конференции по этим вопросам, такие как RSJ, ROBOMEC, SI. ROBOMEC.
В этой статье будет рассказано о состоянии японской робототехники и мехатроники и их применении в строительстве, а также будущие разработки.
Последние достижения в области робототехники и мехатроники
Чувствительность
3D измерения полезны для работы автономного и мобильного робота при распознавании его окружения, а также при реконструкции крупномасштабных трехмерных структур на строительных площадках. Сочетание LRF и камеры позволяет реконструировать внутреннюю часть здания.
SLAM - полезная технология для создания карт и локализации роботов одновременно. Также была разработана усовершенствованная технология 6-DOF SLAM с использованием совмещения сканирования на основе трехмерной информации о расстоянии, получаемой всенаправленным стереозрением. Полученное сканирование оценивается по алгоритму Iterative Closest Point (ICP), а результат интегрируется с помощью расширенного фильтра Калмана.
Привод в действии
Ловкие ручные механизмы способны манипулировать различными объектами на строительных площадках. Для реализации двух активных осей вращения на поверхности захватываемого объекта предлагается уникальный механизм с разнонаправленным ведущим роликом. Цилиндрическая гусеничная тележка может применяться в качестве ролика, а пальцы могут манипулировать захваченным объектом по произвольным осям.
Мобильный робот
Мобильная манипуляция является одним из активных направлений исследований. В рамках проекта NEDO Intelligent Robot Project была разработана и построена новая мобильная платформа манипуляторов для содействия разработке так называемых интеллектуальных модулей роботов (RTM) для типовых программ их перемещения и прикладных задач.
Всенаправленная мобильность полезна в сложных условиях строительства. Большей подвижности можно добиться, внедрив литейный механизм. Колесо с активным роликом отличается простым устройством KEYNOTE II 8 и высокой точностью позиционирования, что позволяет роботу осуществлять более точную транспортировку объекта.
Экзоскелеты
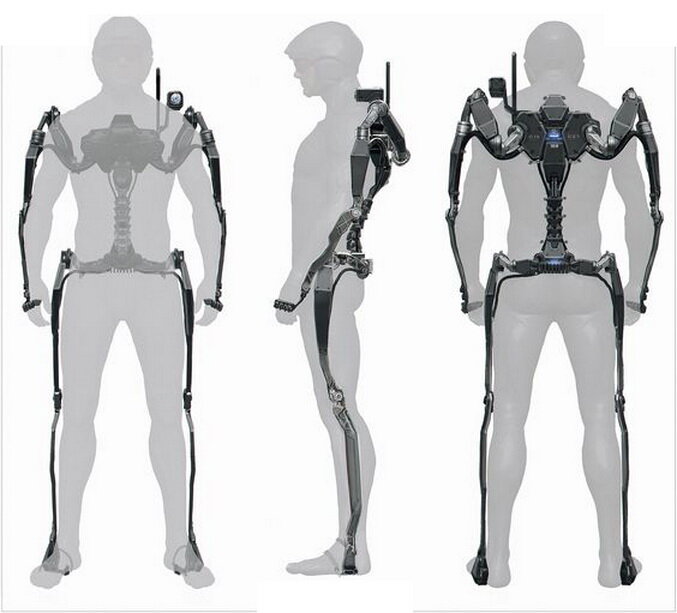
Система экзоскелетов имеет долгую историю развития с начала 1960-х годов на General Electric. В японских университетах проводится более 15 научно-исследовательских мероприятий. Главная цель экзоскелетов заключается в том, чтобы поддержать ослабленных пожилых людей и инвалидов в их повседневной жизни, а также помочь трудящимся, выполняющим тяжелые обязанности, характерные для строительных площадок. Ключевыми вопросами являются компактность конструкции исполнительного механизма, портативность источника энергии и т. д.
Гуманоиды
Исследования и разработки в области гуманоидов являются одними из самых активных работ в Японии. HONDA ASIMO, робот-партнер TOYOTA и AIST HRP являются хорошо зарекомендовавшими себя гуманоидными платформами. HRP2 используется в качестве общей платформы в университетах и институтах, где проводятся фундаментальные исследования, такие как стабильная ходьба, практическое использование видения для распознавания объектов, стратегия управления. Все это нужно для того, чтобы робот был надежно внедрен в нашу повседневную поддержку. Важнейшим вопросом является также безопасность. Психологическая безопасность гуманоида, не вызывающего страха, дискомфорта, тревоги, оценивается психологически, а также устанавливается физическая безопасность.
Применения на реальных стройплощадках
Автономный колесный погрузчик
Автономный колесный погрузчик «Ямазуми-4» успешно прошел беспилотную погрузку свай. Точное управление перемещением необходимо для повторения операций загрузки. Несмотря на то, что у колесных погрузчиков KEYNOTE II 9 существует проблема управления точной скоростью движения, планирование пути и последующее управление были успешно разработаны с использованием одометра, который позволяет достичь точной геометрической формы пути.
Беспилотная конструкция
Беспилотное строительство в основном требуется для восстановления поврежденной местной инфраструктуры, а также для предотвращения дальнейшей эрозии земель. В 1990 году крупное извержение вулкана Унзен-Фуген-Даке нанесло значительный ущерб окружающей местности, а беспилотные методы строительства применялись для реставрационных работ в верховьях реки Мизунаши, где с 1994 года ведется подготовка дорог к строительству, удаление почвы и камней из земляных накопительных бассейнов, снос поврежденных заводов, установка блоков, строительство пескоуловителей, направляющих стен и берегов регулирования потока.
Недавно была достигнута беспилотная транспортировка и установка арочной трубы весом около 15 тонн. По готовому маршруту к площадке была проложена арка, и беспилотный экскаватор с большим захватом поднял ее и зафиксировал в заранее запланированном положении с помощью ручных болтов, после чего был выполнен беспилотный осмотр.
Строительная робототехника и автоматизация до сих пор востребованы на реальных стройплощадках, поскольку люди сталкиваются с серьезными проблемами в пожилом возрасте. За сильными землетрясениями и цунами последовало немало строительных работ для восстановления. Автономное и беспилотное строительство в основном ожидается на опасных объектах рекультивации. Эти полезные методы должны применяться не только в пределах Японии, но и за рубежом.