Вторая часть серии про эксперименты по созданию небольших подводных аппаратов. Данное увлечение требует владения многими инженерными навыками, такими, как программирование, электроника, конструирование. Сегодня опишу электронику, управляющую аппаратом и способ её герметизации.

приёмник/передатчик
В платах, для связи пульта с подлодкой, используются пара дешёвых китайских модулей DRA889TX (передатчик) и DRA887RX (приёмник).
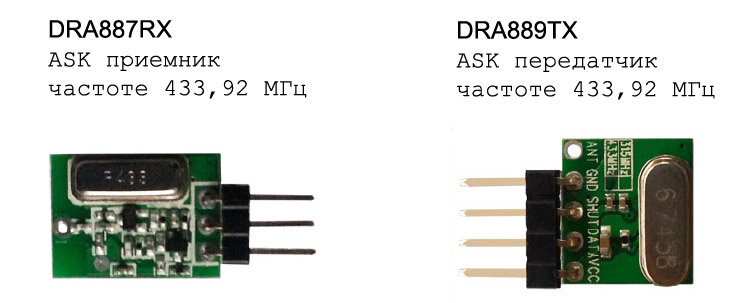
Теоретически, радиосвязь не должна работать под водой и изначально я предполагал использовать ИК-управление. Но оказалось, что данные радио-модули пробивают достаточно в глубину, что бы без проблем управлять моделью в ванной. Тем более ванна была акриловой и сигнал до аппарата мог приходить с любой стороны. Это значительно облегчило проектирование. Так как никакого встроенного протокола в дешёвых модулях нет, я использовал протокол своей разработки.
Электронная плата подлодки
Плата выглядит, как куча проводов, так как использовались отдельные модули, соединённые проводами, по принципу arduino-модулей.
Все модули, кроме приёмника и передатчика, самодельные
- микроконтроллер ATtiny2313A
- радиоприёмник DRA887RX
- драйвер для толкающих винтов L293D
- драйвер для мотора всплытие/погружение IR4428
- стабилизатор на 5 вольт NCP551
- аккумулятор 18650 2 шт.
Благодаря драйверу на микросхеме L293D, толкающие винты могут вращаться в разные стороны и с разной скоростью.
Винт всплытия/погружения работает в ключевом режиме.
Электронная плата пульта
Модули пульта управления:
- микроконтроллер ATtiny13A
- радиопередатчик DRA889TX
- стабилизатор на 5 вольт NCP551
- модуль джойстика
- модуль на 2 кнопки
- аккумулятор 18650 2 шт.
Посредством джойстика, можно управлять скоростью и направлением вращения толкающих винтов. С помощью двух кнопок осуществляется всплытие/погружение с помощью нижнего винта.
Герметизация электронной платы
Для герметизации электронной платы я использую обычные полиэтиленовые пакеты и специальный цилиндр напечатанный на 3D принтере. В цилиндре есть два канала, большой, центральный для вывода проводов наружу и маленький канал для откачки воздуха.
Провода от платы, которые нужно вывести наружу, пропускаются через центральный канал и затем канал заливается термоклеем. Заливать нужно качественно, я прогревал всё паяльным феном, что бы клей заполнил все трещенки и обволок все провода.
Затем электронная плата обматывается мягким материалом и вкладывается в полиэтиленовый пакет. Для надежности, я использовал два пакета вложенных один в другой. Мягкий материал служит для впитывания влаги, если она сможет просочиться и для защиты пакетов от проколов об элементы платы. В качестве мягкого материала я использовал туалетную бумагу. Она дешёвая и хорошо держит влагу.
Далее пакеты прикручиваются к цилиндру с помощью изоленты. Выступающие края пакетов обрезаются ножницами. И в конце из пакетов откачивается воздух через второй канал, который потом закрывается силиконовым колпачком.
Чем лучше откачен воздух, тем меньшая плавучесть у платы и потребуется меньше балласта при выставлении необходимой плавучести у готового подлодки.
Подобный способ герметизации справился с задачей. Плату ни разу не замкнуло. Самая ответственная часть - качественно залить термоклеем канал с проводами. Нужно разделять каждый провод, что бы клей обволакивал провод с каждой стороны, иначе вода будет просачиваться между проводами.
Провода, выходящие наружу, шли к моторам. То есть, если была необходимость залить новую прошивку или добавить новый модуль, то просто снимается пакет, снимаются с разъёмов провода моторов и плата в вашем распоряжении. Потом быстренько одевается и приматывается пакет, откачивается воздух и аппарат готов.
Если же возникала необходимость изменить количество моторов, то приходилось паяльным феном плавить термоклей, вынимать провода и делать всё заново, благо, необходимость в этом возникает редко.
Ну и в конце видеоролик где есть кадры герметизации электронной платы.
Продолжение следует...
Подписывайтесь на канал, ставьте лайки, пишите в комментариях ваши мысли и идеи. Да прибудет с нами Сила!
foo52ru