
Использование мобильных роботов является эффективным методом анализа сенсорно-моторных моделей животных в реальных условиях
Мобильные роботы, управляемые насекомыми, привлекают инженеров, которые стремятся извлечь пользу из использования живых организмов в усовершенствовании робототехники.
Однако прямое сравнение роботов с реальными насекомыми все еще затруднено, даже если мы сможем успешно промодулировать биологические системы, из-за физических различий между ними.
Был разработан гибридный робот, чтобы заполнить этот пробел
Этот гибридный робот является роботом в котором привязанный самец моли управляет им, чтобы выяснить, откуда идет запах феромонов женской особи.
Этот робот имеет следующие три преимущества:
- С биомиметической точки зрения робот позволяет оценить потенциальную производительность будущих роботов-миметиков насекомых;
- С биологической точки зрения робот позволяет управлять инстинктами насекомого для дальнейшего понимания его сенсорно-моторной системы;
- Робот позволяет сравнивать данные с другими моделями поведения насекомых в качестве эталонной биологической системы.
Насекомые представляют интерес для исследователей, разрабатывающих автономных мобильных роботов, благодаря их способности вести себя адаптивно (адаптивное поведение) в реальной среде с их маленькими сенсорными органами, нервной системой, мышцами и конечностями для опорно-двигательного аппарата. В исследовании по нейроэтологии, в котором исследователи ищут нейронные основы поведения животных, мобильные роботы взяли на себя важную роль для проверки сенсорных моделей насекомых в реальной среде. Роботы, реализованные с помощью таких моделей насекомых, рассказывают биологам, насколько хорошо они понимают сенсорно-моторную систему насекомых.
Использование мобильных роботов помогает улучшить наше понимание нейронных механизмов, лежащих в основе адаптивного поведения насекомых в реальной среде.
Роботы, ведущие себя в той же реальной среде, что и насекомые, рассказывают нам о том, как реализованные модели эффективны для формирования адаптивного поведения, даже если они основаны на экспериментах без взаимодействия (например, нейронные записи из изолированной ткани тела или при упрощенных сенсорных стимулах), поскольку адаптивное поведение возникает из взаимодействия между нервной системой, телом и средой.
Однако существуют некоторые ограничения в сравнении поведения реальных насекомых и роботов из-за физических различий между ними.
Возможным решением для получения такой "референсной системы" является разработка гибридной системы, в которую в контур управления мобильного робота встраивается настоящее насекомое
На основе этой было разработано новое роботизированное устройство
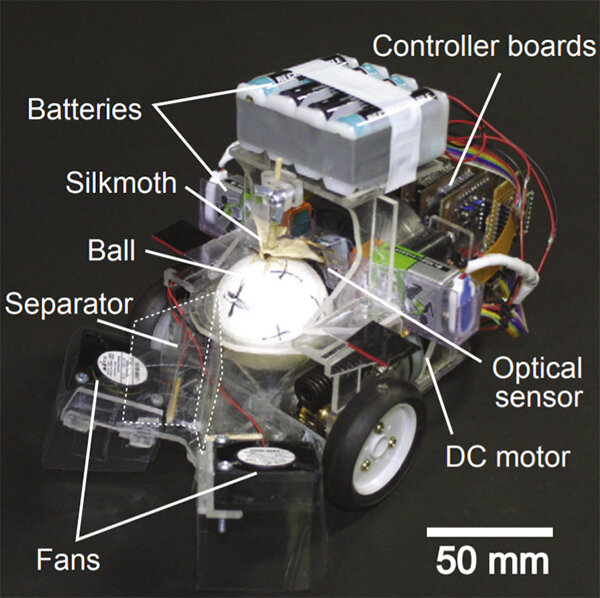
В результате получилась система инсектоскопического робота. Этот мобильный робот управляется поведением при ходьбе самца моли (Bombyx mori), который чувствителен к специфическому женскому феромону и надежно реагирует на них, определяя их источник.
Этот робот предназначен для следующих трех областей как с технической, так и с биологической точки зрения:
- Оценка возможности отслеживания запаха сенсорно-моторной системы насекомых;
- Понимание сенсорно-моторной системы насекомых путем манипуляции свойствами робота, что неинвазивно изменяет сенсорную обратную связь с искусственным насекомым;
- Сравнение результатов анализа, полученного с использованием робота.
Поведенческий контроль мобильного робота представляет собой простой и надежный метод прямого соединения насекомых с роботизированной двигательной системой
Учитывая сложность потока запаха в естественной среде, использование мобильных роботов в реальных условиях является простым подходом к оценке способности насекомых локализовать источник запаха. Недавний прогресс в области оптогенетики и миниатюрных электрических устройств представляет множество интерфейсов между биологической и искусственной системами на сенсорном, технологическом и моторном уровнях для исследований.
Гибридные роботы еще больше сократят разрыв между биологической и искусственной системами, объединив эти методы
Они также подчеркивают сходства или различия между ними. Поэтому дальнейший прогресс в развитии гибридных роботов будет полезен как для биологов, стремящихся всесторонне понять мозг, так и для инженеров, стремящихся получить все технологические преимущества от биологических систем.