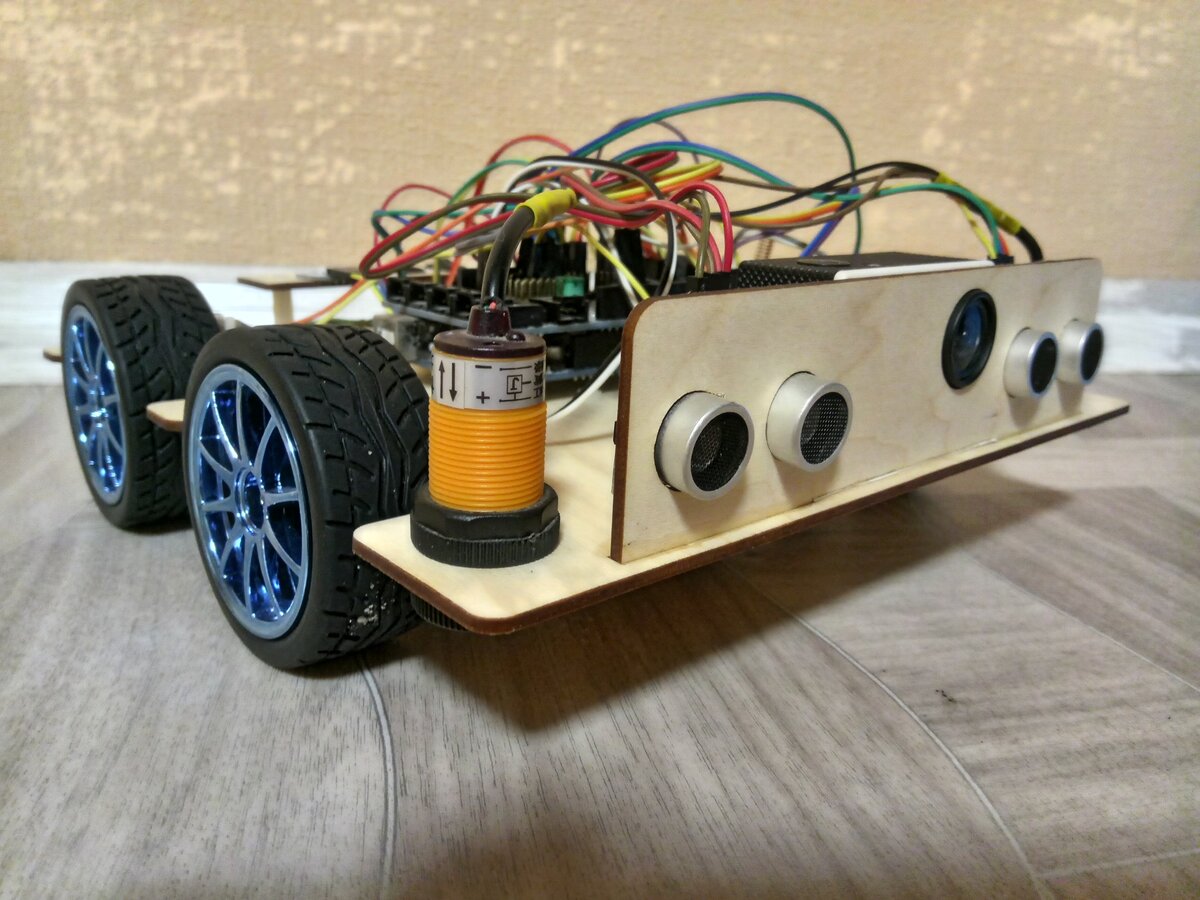
Колесный робот - мобильное шасси робота на базе микроконтроллера Ардуино представляет собой платформу с четырьмя ведущими колесами. Каждое колесо приводится в движение редуктором с мотором. Платформа вырезана лазерным станком из фанеры толщиной 4 мм.
Электронная начинка колесного робота:
- Ардуино Мега
- Sensor shield
- Ардуино Нано (для пульта РУ)
- Ультразвуковой датчик (2 шт.)
- Драйвер для двигателей (2 шт.)
- Инфракрасный датчик (2 шт.)
- Приемник-передатчик 433MGz
- Полноцветный LED модуль
- Датчик столкновения (2 шт.)

Механика робота:
- Мотор N20
- Крепеж для мотора N20
- Насадка на вал 3 мм
- Колесо 65 мм
Управление колесным роботом осуществляется в трёх режимах: радиоуправление, самостоятельное движение и откат по памяти назад. Для индикации текущего режима работы используется полноцветный LED модуль. В режиме радиоуправления светодиод мигает, при самостоятельном режиме - светится постоянно, синий цвет - откат по памяти.
Описание используемых классов Ардуино :
KemaUS - работа с ультразвуковыми датчиками. При расстоянии до препятствия более 30 см колесный робот движется вперед, сигнал на LED индикаторе зеленый. При расстоянии 15 - 30 см - он останавливается, LED индикатор желтый. При приближении препятствия менее чем на 15 см - робот едет назад, LED индикатор красный.
KemaIR - работа с инфракрасными датчиками. Данные датчики срабатывают на определенном расстоянии, в данном случае чуть ниже плоскости, на которой стоят колеса робота. Если хотя бы один срабатывает, то робот останавливается.
KemaState - класс для сохранения состояния робота. В него записываются показания датчиков, скорость и поворот, если есть. В скетче для Ардуино Меги используются две переменные этого класса: текущее и предыдущее состояния. Также используется в классе KemaMem.
KemaDrive - класс для управления моторами. Скорость отрицательная - назад, положительная - вперед. Отрицательный поворот - влево, положительный - вправо.
KemaLED - класс для управления полноцветным LED индикатором. Мигание означает режим радиоуправления, постоянный свет - режим робота. При этом могут гореть три цвета:
зеленый - робот едет вперед (нет препятствий);
желтый - робот стоит;
красный - робот едет назад.
Синий индикатор - откат по памяти.
KemaMеm - класс памяти робота. При каждой итерации цикла loop() в память контроллера Ардуино записываются данные по скорости и повороту, итого 3 секунды. Смысл этой памяти в том, чтобы откатываться назад, т.е. если робот ехал вперед, то он катится назад и т.д.
Официальные страницы в интернете:
- Канал на YouTube: Робототехника видео
- Группа ВК: Робототехника
- Рынок робототехники: Роботехмаркет
Еще статьи по робототехнике:
* Геометрия поворота колесного робота
* Исследование диаграммы направленности ультразвукового датчика