Первый пилотируемый полет советского космического корабля «Восток-1» с Ю.Гагариным прошел полностью в автоматическом режиме. Не смотря на то, что система управления и предусматривала переход на ручное управление, но Юрий Гагарин лишь контролировал основные параметры не вмешиваясь в работу системы.
Первый американский орбитальный полет с Джоном Гленном так же проходил в автоматическом режиме, однако, программа трехвиткового полета предусматривала временный переход на ручной режим для оценки управляемости космическим кораблем «Меркурий» в реальных условиях космического полета.
В этой статье я расскажу о технической стороне системы управления КК «Меркурий».
Система управления КК «Меркурий» позволяла осуществлять различные операции, необходимые для успешного орбитального полета. С помощью этой системы можно было точно установить корабль в положение, соответствующее запуску тормозных двигателей и удерживать это положение во время работы тормозных двигателей. Без такого управления полет мог оказаться неудачным. Система управления КК «Меркурий» была выполнена так, что она могла работать даже при выходе из строя отдельных элементов системы.
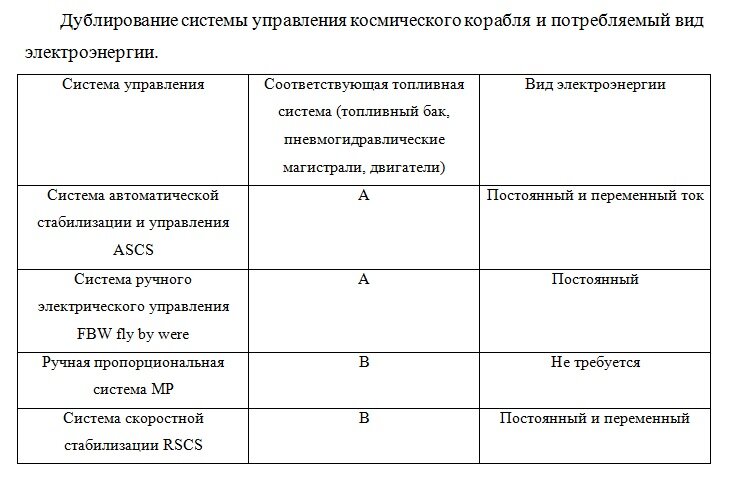
На корабле имелись две независимые системы (А и В) подачи топлива, пневмогидравлические магистрали и двигатели.
Для создания необходимого импульса в каждой системе примерялась 90% перекись водорода. Управление каждой из этих систем осуществлялось двумя способами: для управления системой А астронавт мог выбрать либо систему автоматической стабилизации и управления (ASCS), либо систему ручного электрического управления (FEB). Система ASCS могла обеспечить управление положением в течении всего полета без участия астронавта. Эта система применялась при безэкипажном полете КК «Меркурий». Система FEB приводилась в действие рукояткой управления космонавта. Движения этой рукоятки преобразовывались в электрические сигналы, которые изменяли положение соленойдных дроссельных клапанов.
В система В астронавт мог пользоваться ручной пропорциональной системой (МР) или системой скоростной стабилизации (RSCS). Обе эти системы приводились в действие рукояткой управления астронавта. При использовании системы МР движения ручки управления механически передвигались пропорционально дроссельным клапанам, которые регулировали подачу топлива к двигателям. Работа системы RSCS зависела от положения ручки управления и данных автоматического вычислительного устройства системы скоростной стабилизации.
Способ управления выбирался астронавтом путем поворота соответствующих выключателей и клапанов на приборной доске. Следует заметить, что при необходимости некоторые системы управления могли действовать одновременно, например, такие, как ASCS и MP, или FBE и MP, так что в случае неполадок в одной из систем общее управление все равно было обеспечено. Заслуживает внимания вопрос о том, какой вид электроэнергии требовался для этих систем управления. Для ручной пропорциональной системы управления никакой электроэнергии не требовалось. Существовало 4 основных способоа управления тяговыми импульсами с помощью 18 индивидуальных двигателей.
Расположение агрегатов системы реактивного управления.
Двенадцать двигателей в система А и шесть в система В поазаны на схемах управления угловым положением корабля.
Схема системы А управления угловым положениемкорабля.
Схема системы В управления угловым положением корабля.
На этих рисунках не показаны полностью споособы электрического управления двигателями, так на рис.1 нет переключателя «ручное управление –система ASCS», который включал либо систему FBF, либо ASCS.
Аналогично на рис.2 не изображена связь ручного управления через переключатель и блоки ASCSс соленойдами двигателей для управления RSCS. Чтобы создать необходимый импульс, соответствующее количество перекиси водорода разлагалось на серебряных пластинчатых катализаторах, расположенных в камерах сгорания двигателей. Для управления во время маневра торможения на КК «Меркурий» применялись 12 двигателей.
Остальные шесть двигателей системы А обеспечивали точное управление угловым положением при полете по орбите с минимальным расходом топлива. Тяга каждого из этих двигателй 0,45кг.
В полете «МА-6», хотя Джон Гленн и менял способы управления, система управления вцелом обеспечивала управление положением КК на всех фазах полета, несмотря на небольшие неисправности в двигателях (но это отдельная тема для разговора)., которые не позволили осуществить работу системы с минимальным расходом топлива на первом этапе полета при ориентации по оси рысканья. Джон Гленн весьма удовлетворительно совершил все запланированные маневры в космосе, ориентировал корабль для наблюдения за Землей и звездами, обеспечивал точное управление во время запуска тормозных ракет, применяя как ручные, так и автоматические средства управления, и добился требуемого положения КК во время входа в плотные слои атмосферы.
При входе после прохождения области максимального динамического давления Джон ГЛенн успешно справлялся с поперечными колебаниями с помощью ручной пропорциональной системы и ручного электрического управления, пока не выработалось топливо в системе В.
Что бы погасить вновь возникшие колебания, Джон Гленн воспользовался автоматической системой управления, с помощью которой ограничивал колебания до тех пор, пока не было выработано топливо и в система А.