Современные логические микросхемы имеют гораздо меньший ток потребления, чем на заре своего появления. Это связано и с совершенствованием технологии, и с развитием схемотехники микросхем, и, пожалуй самого главное, с использованием полевых транзисторов вместо биполярных.
При этом часто , и справедливо, считается, что цифровые микросхемы на полевых транзисторах имеют чрезвычайно низкий ток потребления. Но не менее часто при этом забывают добавить - в статическом режиме. То есть, когда ни состояние внешних, ни состояние внутренних, сигналов не изменяется.
А вот при работе микросхемы, особенно на высоких частотах, потребляемый ток может быть довольно большим. Давайте посмотрим, почему так происходит и насколько ток потребления в динамическом режиме может быть больше тока потребления в статическом режиме.
Целевая аудитория статьи - любители электроники, а не профессионалы. Причем не только начинающие, хотя в статье не будет сложных формул.
Все описанное в статье применимо не только к цифровым микросхемам на полевых транзисторах, но и к цифровым микросхемам на биполярных транзисторах.
Схемотехника простейших элементов CMOS (КМОП) логики и статический режим работы
Я не сомневаюсь, что все читатели хорошо знают, как выглядят схемы логических элементов CMOS. Или, как минимум, представляют. Но все таки приведу схему элемента 2И-НЕ
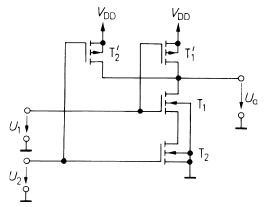
При низком уровне напряжений на входах транзисторы (n-mos) Т1 и Т2 закрыты, а транзисторы (p-mos) Т1' и Т2' открыты. Если к выходу не подключена нагрузка, то при идеальных транзисторах, ток потребления от источника Vdd равен 0. Равно как и ток потребляемый от источников входных сигналов, так как затворы изолированы от каналов.
Можно соединить, в любой комбинации, любые логические элементы на идеальных полевых транзисторах. Ток потребления, при неизменных сигналах на входе и отсутствии нагрузки, будет нулевым.
В реальных микросхемах используются реальные транзисторы, которые имеют некоторые токи утечки затворов между электродами. Это и приводит к появлению потребляемого тока в статическом режиме. Но поскольку токи утечки малы, мал и потребляемый ток. И это важное преимущество таких микросхем.
Емкости полевых транзисторов
Но, кроме токов утечки, реальные транзисторы имеют заметные межэлектродные емкости.
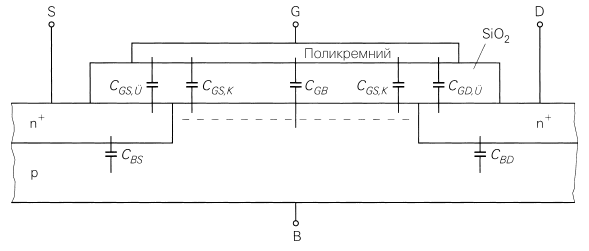
В статическом режиме, когда напряжения на электродах транзисторов не меняются, эти емкости не оказывают влияния на работу логических элементов. Но в момент переключения эти емкости будут перезаряжаться, что приведет к появлению пиков тока через них. При этом пики тока появятся и в цепи затвора, что означает отличный от нуля потребляемый от источника сигнала ток.
Длительность пиков потребляемого тока мала, доли наносекунд-наносекунды. Но их амплитуда может быть значительной. Эти импульсы тока потребления создают помехи в цепях питания, которые могут вызвать сбои в работе схемы. Кроме того, они прекрасно могут проникать и в другие цепи через емкость между проводниками схемы. Именно по этой причине и устанавливают блокировочные конденсаторы (чаще всего керамические) непосредственно у выводов питания микросхем, что бы минимизировать длину участков протекания импульсного тока. Но сегодня речь не о помехах и способах их устранения.
Динамическая мощность потребления без нагрузки
Малая длительность импульсов тока потребления дает ненулевую , но очень малую, потребляемую от источника питания мощность. При малой частоте переключения логических элементов эту мощность можно даже не учитывать. Но с ростом частоты растет и ее вклад в энергопотребление.
Вот это мощность, которая расходуется на перезаряд емкостей транзисторов, и других паразитных емкостей микросхемы, и называется динамической мощностью потребления. Динамическая мощность потребления не зависит от мощности потребления в статическом режиме, статической мощности. Она зависит только от частоты переключения и суммарной паразитной емкости.
Поскольку нам не известны величины внутренних емкостей микросхем, а зачастую и схемы внутренних элементов, нет возможности оценить потерь на переключение. Но выход все таки есть. Производители часто указывают в документации на микросхемы эквивалентную емкость рассеивания мощности - Cpd.
Правда условия, для которых указывается эта емкость, могут быть различными. Иногда указывается Cpd для микросхемы в целом, иногда для одного элемента микросхемы. Измерение емкости может быть выполнено на определенной частоте или может быть указано некое усредненное значения при для разных частот. Поскольку эта паразитная емкость зависит от напряжения, могут быть указаны ее значения для разных напряжений питания и разных уровнях входных/выходных сигналов.
Но точный расчет динамической рассеиваемой мощности и не требуется, достаточно ее приближенной оценки. Динамический ток и мощность потребления (усредненное значение) определяются так
Причем скважность входных импульсов принимается равной 2. А теперь давайте посмотрим, какая динамическая мощность будет рассеиваться некоторыми микросхемами дискретной логики.
Сначала возьмем NC7WZ04, это сдвоенный инвертор. Согласно документации Cpd этой микросхемы равна 11 пФ (типовое значение) при напряжении питания 5 В и комнатной температуре. Давайте оценим динамическую рассеиваемую мощность на частоте 10 Мгц. Если подставить все нужные значения в формулы, то получим Iccd = 0.55 мА. Согласитесь, это не так и мало, особенно, если учесть, что в статическом режиме при комнатной температуре потребляемый ток равен 1 мкА (типовое значение) и 10 мкА (максимальное значение) во всем диапазоне рабочих температур. Соответственно, рассеиваемая динамическая мощность будет равна 2.75 мВт.
Для популярной микросхемы 74HC595, сдвиговый регистр, Cpd равно 115 пФ (измерено на частоте 1 МГц). На этой частоте при напряжении питания 5 В динамический ток потребления будет 0.58 мА, а на частоте 10 МГц 5.8 мА. Соответственно, динамическая рассеиваемая мощность 2.88 мВт и 28.8 мВт. При том, что в статическом режиме эта микросхема потребляет не более 80 мкА при комнатной температуре и напряжении питания 5 В.
Не редко динамической мощностью рассеивания называют суммарную мощность. То есть, в приведенных выше формулах нужно добавить статический ток потребления в виде слагаемого. Из приведенных примеров расчета хорошо видно, что для высоких частот можно не учитывать статический потребляемый ток, так как он гораздо меньше динамического тока. Но для малых частот такой учет статического тока потребления может стать значимым.
Динамическая рассеиваемая мощность с учетом емкости нагрузки
К каждому выходу микросхемы может быть подключена нагрузка обладающая какой то емкостью. Учесть влияние емкости нагрузки можно можно так
Обратите внимание, что здесь уже появилась частота переключения для каждого выхода, так как она может отличаться от частоты входных сигналов.
Давайте подсчитаем, какой будет динамическая потребляемая мощность микросхемы 74HC595 если ко всем ее выходам (8 выходов) подключена нагрузка емкостью 20 пФ. При этом будем считать, что частота тактирования 10 МГц, а в регистр поочередно загружаются байты 00000000 и 11111111, которые и появляются на выходах. Напряжение питания 5 В.
Для загрузки байта в регистр требуется 8 тактов. После загрузки нужен один так для копирования информации из регистра сдвига в регистр выходной защелки. Таким образом, для изменения состояния выходов требуется 9 тактов, а частота изменения выходных сигналов составляет 1.11 Мгц.
При этих условиях у нас часть динамической мощности зависящей от входной частоты будет такой же, как мы рассчитывали выше. То есть 28.8 мВт. Дополнительная динамическая мощность для нагрузки каждого выхода будет равна 0.55 мВт. Что дает суммарную динамическую мощность зависящую от емкости нагрузки 4.4 мВт. То есть, динамическая мощность потребляемая микросхемой в рассматриваемом режиме работы может достигать 33.2 мВт.
Как видно, увеличение из-за емкости нагрузки не очень большое. Причина проста - частота переключения выходов гораздо ниже входной частоты. Наконец, мы можем сравнить все полученные значения для 74HC595
Статическая потребляемая мощность - 0.4 мВт
Динамическая мощность на частоте 10 МГц без нагрузки - 28.8 мВт
Динамическая мощность на частоте 10 МГц с нагрузкой - 32.2 мВт
В рабочем режиме, который мы выбрали для примера, потребляемая мощность в 80.5 раз превышает мощность потребления в статическом режиме!
Заключение
Такое существенное превышение потребляемой в рабочих режимах мощности требует учета при проектирования источников питания цифровых устройств.
Но отсюда же и хорошо видно, почему стремятся к снижению напряжения питания ядра, например, микропроцессоров и микроконтроллеров. И почему для экономии энергии при батарейном питании следует выбирать как можно более низкую рабочую частоту схемы.
Динамическая потребляемая мощность уменьшается линейно с уменьшением частоты. А вот от напряжения питания ее зависимость квадратичная.
Рост потребляемой мощности мощности с ростом рабочей частоты, в той или иной мере, есть у любых электронных устройств. А вот зависимость от напряжения питания может быть не столь очевидной.