После разработки колесного робота (см. статью колесный робот) я загорелся идеей сделать робота или бота, способного ездить по стенам. После плоскости пола освоить так сказать третье измерение)
Стенобот - мой проект робота.
В отличие от приведенного примера, в моем проекте для удержания бота используется сила присасывания между плоскостью стены и самим роботом.
Рассмотрим чертеж с расстановкой действующих сил:
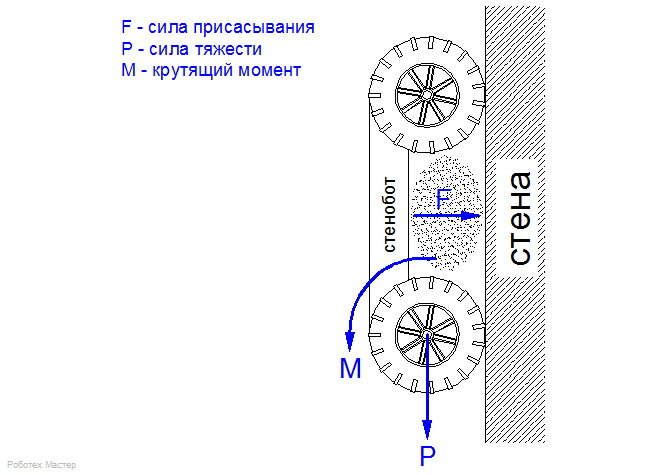
Первые эксперименты показали, что для компенсации крутящего момента М и исключения опрокидывания колесного робота, сила присасывания F может быть не слишком большой.
Наибольшее значение для езды по стене имеет сила трения между колесами робота и поверхностью стены. Эта сила зависит от шероховатости поверхностей и силы присасывания.
Основные тонкости разработки колесного работа для езды по стенам:
- масса (чем меньше, тем лучше)
- конструкция и материал колес (чем сильнее трение, тем лучше)
- сила прижатия к стене (чем больше, тем лучше)
Конструкция стенобота
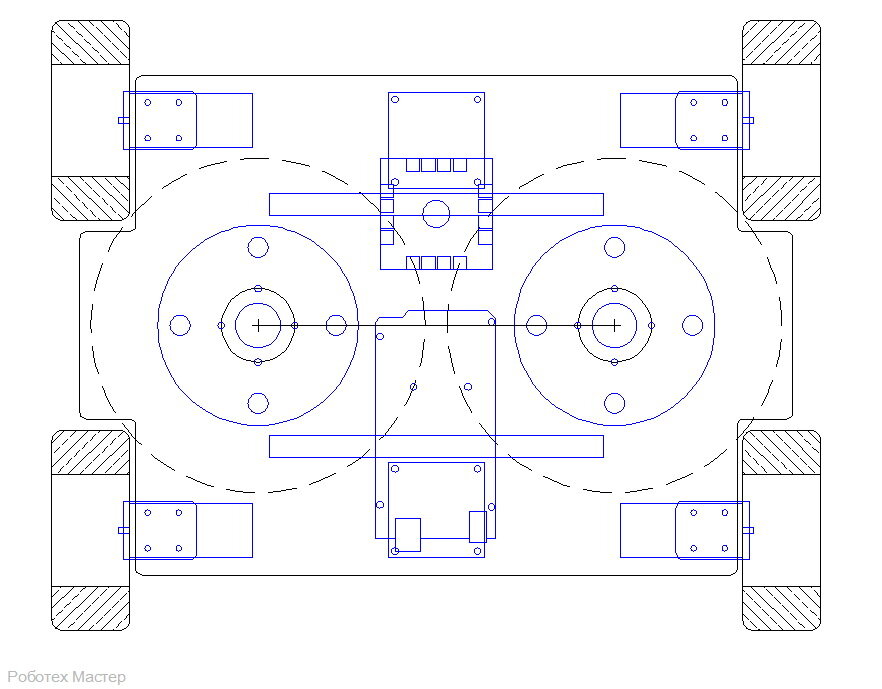
Конструкция стенобота - это 4х колесный полноприводной робот. Для обеспечения хорошего трения с поверхностью стены используются мягкие шины диаметром 96 мм.
Способ получения силы присасывания к стене пока оставляю под секретом.
А электронная часть - на базе микроконтроллеров Arduino Mega и Nano.
Скоро представлю первые испытания. Следите за новостями, чтобы первыми увидеть, как стенобот поедет по стене ! Подписывайтесь !
- Канал на YouTube: Робототехника видео
- Группа ВК: Робототехника