Сразу после первых выходов в открытый космос, перед инженерами СССР и США встала задача по разработке систем, позволяющих космонавту/астронавту передвигаться в открытом космическом пространстве: СССР приступил к разработке системы УПМС для эксплуатации на КК «Восход» с возможностью выхода через шлюз «Волга» (читай статью об установке УПМС), в то время, как американская установка AMU предназначалась для экспериментальной программы «Джемини».

Система AMU включала скафандр, нагрудный ранец с системой жизнеобеспечения (далее СОЖ) и наспинный ранец, обеспечивающий маневрирование.
Внешний вид установки AMU
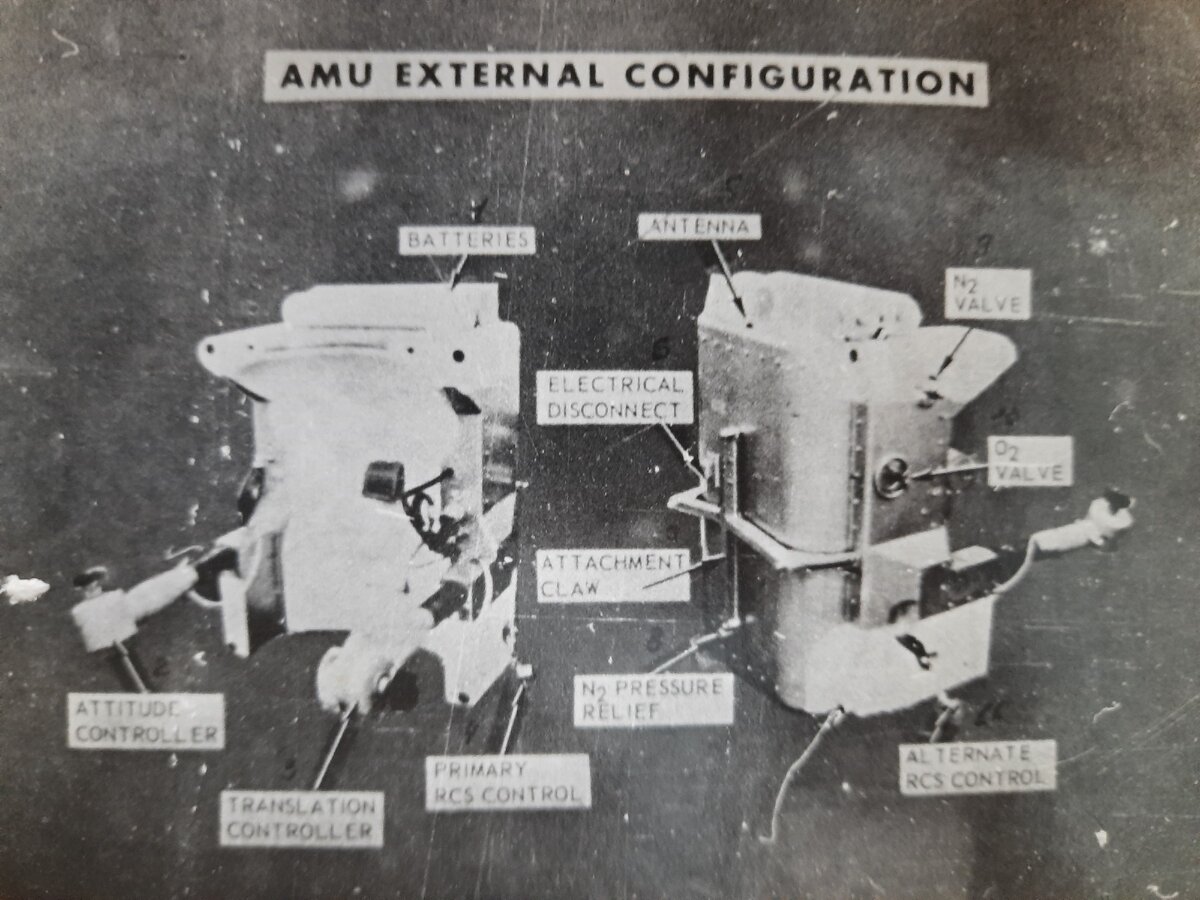
1-батареи;
2-сопло управления пространственным положением;
3-сопло управления перемещением;
4-основная система реактивного управления;
5-антена;
6-электроразъем;
7-выступ, место крепления ранца к борту корабля;
8-азотный спусковой клапан;
9-азотный клапан;
10-кислородный клапан;
11-запасная система реактивного управления.
В нагрудном ранце находилась СОЖ, аварийный запас кислорода и индикаторная панель, отображающая состояние системы и наличие неполадок. В наспинном ранце находилась двигательная установка, система управления полетом, кислородный запас, система электроснабжения и коммуникационная система. Для обеспечения надежности и безопасности, имелось две дублирующих системы управления, которые не зависели друг от друга.
AMU являлась полностью автономной системой и обеспечивала выполнение операций в открытом космосе с возможностью удаления от КК «Джемени» на расстояние до 37,5 метров (ограниченное длиной страховочного троса).
Двигатели установки располагались парами с целью обеспечения наибольшего момента плеча для управления пространственным положением и сосредоточить двигатели относительно центра тяжести. Для меньшего ограничения движения рук и ног, двигатели размещались в углах, или настолько близко к углам и сторонам ранца, насколько это было возможно практически.
Другим фактором, диктующим выбор формы ранца, было место, занимаемое ранцем на борту корабля «Джемини». Было решено разместить ранец в переходном приборном отсеке, что обеспечивало свободный доступ к ранцу и быстрое его надевание. В связи с ограничением места для расположения ранца, рукоятки управления и часть сопел были складными. Наспинный ранец крепился к борту КК «Джемини» с помощью болта, который отрубался резаком гильотины после того, как ранец надет астронавтом.
Профиль полета AMU (последовательность операций).
1-развернуть и надеть нагрудный ранец;
2-выйти и направиться к переходному отсеку;
3-произвести контрольный осмотр и надеть наспинный ранец;
4-отправиться к носовой части и закрепить привязной трос;
5-контрольный полет на небольшое расстояние;
6-оценочный полет на максимальное удаление;
7-возвращение в КК «Джемини»;
8-свернуть нагрудный ранец.
Двигательная система
В качестве топлива использовалась 90% перекись водорода, необходимая для обеспечения общего импульса тяги свыше 1360кг/сек, вес топлива составлял 10,8л.
Перекись водорода содержалась внутри резиновой камеры, которая в свою очередь размещалась в топливном баке. Бак наддувался азотом для обеспечения подачи топлива в условиях невесомости. Азот хранился в азотном топливном баке под давлением 210кгс/см2. Газ поступал через отсечный клапан, регулятор и контрольный клапан.
Каждая система управления (основная и запасная) имела комплект из 8 клапанов двигателя реактивного управления, клапан реактивно системы управления, гироблок, блок электронной аппаратуры управления, блок электропитания и отдельные контакты управляемых вручную рукояток управления.
В каждой системе управления использовалось по 8 двигателей реактивной системы управления. Две из них обеспечивали тягу для движения вперед, два – для движения назад, два – для движения вверх и два – для движения вниз. Номинальная тяга каждого двигателя 1кг. Кроме того, на установке предусматривалось две независимых системы электроснабжения (основная и резервная) с напряжением 28 вольт.
Система управления
Система управления обеспечивала автоматическое пространственное управление полетом и стабилизацию, а также возможность ручного управления перемещением по двум направлениям вперед/назад и вверх/вниз. Если у астронавта появлялась потребность переместиться в бок, он должен был создать угол крена или рысканья порядка 90 градусов и затем переместиться в одном из нужных направлений.
Команды управления подавались вручную посредствам перемещения головок, размещенных на боковых управляющих устройствах. Левый пульт обеспечивал подачу команды по перемещению вверх/низ и вперед/назад, а право обеспечивало управление рысканьем, креном и тангажом.
В автоматическом режиме обеспечивалась стабилизация режима полета по всем трем направлениям при помощи гиросистемы.
Кислородная система
Кислородная система находящаяся в наспинном ранце обеспечивала астронавта запасом кислорода для дыхания. Запас кислорода был рассчитан на несколько часов и хранился в трехлитровом баллоне под давлением 524кгс/см2. В систему СОЖ нагрудного ранца он поступал под давлением 6,8кгс/см2.