Вначале уточним, что термином "возвратно-вращательное движение" здесь будут называться движения подобные движению маятников.
Рассмотрим поведение физического маятника, совершающего возвратно-вращательные движения с размахом в 180 градусов.
Возвратно-вращательное движение обладает уникальными свойствами.
Тело совершающее возвратно-вращательное движение меняет направление движения в крайних точках своей траектории. При этом, если поворот тела ограничен 180 градусами, то непосредственно перед прохождением обоих крайних точек направление движения тела относительно пространства одинаково. Соответственно, в первое мгновение после прохождения крайних точек, направление движения тела относительно пространства также одинаково.
Следовательно, система из двух тел, совершающих противофазные возвратно-вращательные движения, не меняет направление своего линейного ускорения в пространстве в течении всего цикла движения. Одновременно с этим, центробежные ускорения этой системы также не меняют своего направления в пространстве в течении всего цикла движения. Но направления в пространстве линейных и центробежных ускорений взаимно противоположны.
Перечисленные свойства системы из двух маятников позволяют создавать на её основе "безопорные" движители.
Термин безопорный не самый удачный, но он уже вошел в обиход и поэтому приходится им пользоваться, предварив необходимыми пояснениями: "безопорные" движители на самом деле имеют опору, и этой опорой является эфир. Лучшим определением является более развернутое: "движители без отброса реактивной массы", так что далее по тексту под термином "безопорный" мы будем иметь в виду именно движитель без выброса реактивной массы.
"Легализация" безопорного движения является давно назревшей необходимостью. Изобретатели работоспособных безопорных устройств вынуждены оправдываться в нарушениях законов Ньютона, выдумывая "доказательства" соответствия своих изобретений этим законам. Это совершенно абсурдная ситуация, так как именно законы Ньютона искажают картину мира и являются препятствием на пути технического прогресса.
Энтузиастам безопорного движения пора перестать чувствовать себя изгоями, и обрести наконец уверенность в своей правоте. Закон Механики служит им в этом опорой (намеренный каламбур), являясь эффективным инструментом анализа физики безопорного движения. Работоспособные безопорные устройства являются убедительным подтверждением справедливости Закона Механики, и в свою очередь Закон Механики допускает создание подобных устройств.
При создании безопорных устройств, использующих центробежные силы, первостепенной является задача получения однонаправленного линейного ускорения.
Простое (однонаправленное) вращение неизбежно вызывает всенаправленные центробежные ускорения, из которых необходимо выделять однонаправленные линейные ускорения и компенсировать противоположно направленные. Такая компенсация усложняет систему, и ухудшает эффективность движителя, так как является частичной компенсацией, не устраняющей полностью отрицательные ускорения.
В отличии от простого однонаправленного вращения, вращение с циклическим изменением направления, характерное для маятника, позволяет полностью избежать появления обратных линейных ускорений.
Рассмотрим поведение тела совершающего циклическое возвратно-вращательное движение (повороты на 180 градусов) под действием какой-то внутренней силы (например спиральной пружины).
Первая часть - Анализ без учета центробежных ускорений.
Рисунок 1 показывает положение груза маятника в начале цикла движения в направлении черной стрелки. В этом положении скорость груза “V” минимальна, а ускорение “a” максимально. В соответствии с Законом Механики груз будет испытывать силу “F”, приложенную к нему со стороны эфира и направленную противоположно ускорению.
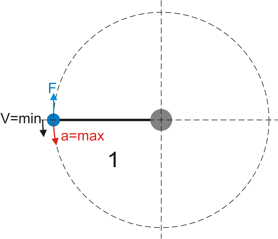
Это сила инерции, и возникает она вследствие ускорения эфира относительно груза. Эфир неподвижен, и ускорение груза относительно эфира эквивалентно ускорению эфира внутри груза в обратном направлении.
При ускоренном движении груза в первом секторе ко всей системе будет приложена внешняя сила, двигающая весь привод в противоположном направлении.
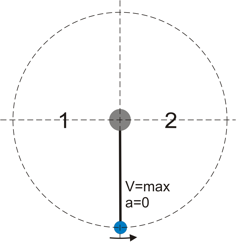
Рисунок2 показывает положение груза посредине между первым и вторым циклами движения. В этом положении скорость груза “V” максимальна, а ускорение “a” равно нулю; так как в этой точке ускорение меняет своё направление, после чего начнет действовать в обратную сторону, затормаживая груз. Соответственно сила со стороны эфира, вызываемая линейным ускорением груза, в этой точке будет отсутствовать.
На самом деле сила приложенная со стороны эфира в этой точке все-таки существует, это центробежная сила, но в этой части нашего анализа мы её пока не рассматриваем, так как сейчас нас интересуют ускорения возникающие в результате "простого" линейного движения груза.
И цель такого ограниченного анализа, - показать, что вращательное движение обеспечивает плавное изменение направления линейного движения тела на противоположное, без промежуточной остановки тела.
Такая остановка неизбежна в случае возвратно-поступательного движения. Но в случае возвратно-вращательного движения, изменение направления происходит без линейных ускорений.
Остановки и последующие линейные ускорения происходят в начале участка 1, и в конце участка 2, и в обеих этих точках ускорения имеют одинаковое направление по отношению к окружающему пространству. В результате груз приобретает однонаправленные ускорения, т.е. может двигаться отталкиваясь от пространства.
На самом деле, система будет двигаться в обратном направлении, и мы обсудим это обстоятельство позже, а пока продолжим рассмотрение процесса возвратно-поступательного движения
Рисунок 3 показывает положение груза в конце цикла движения. В этом положении скорость груза “V” уменьшается до минимума, а торможение (отрицательное ускорение) “a” максимально. В соответствии с Законом Механики груз будет испытывать силу “F”, приложенную к нему со стороны эфира и направленную в противоположную ускорению сторону, то есть, в ту же сторону, что и прежде.
Как мы видим, возвратно-вращательное движение груза сопровождается внешней силой приложенной из эфира. Эта сила имеет одно и тоже направление в зеркально-симметричных точках траектории груза, то есть, груз не меняет направление своего ускорения относительно эфира. Это происходит из-за того, что груз меняет направление скорости и одновременно меняется знак ускорения (т.е. ускорение сменяется торможением).
После этого все процессы повторяются в обратную сторону. И снова происходит инверсия ускорения груза во второй половине цикла, так как изменяется направление движения груза вследствие его поворота.
Далее представлены графики скорости груза "v" и проекции линейного ускорения на горизонтальную ось координат. Скорость груза монотонно увеличивается (ускорение "a" = const) до максимальной в точке 90 градусов, затем спадает до нуля в точке 180 градусов.
Масштаб линейного ускорения на графике увеличен в 10 раз, иначе график ускорения будет почти неотличим от прямой линии.
Следующий график дополнен центробежным ускорением.
И наконец сумма линейного и центробежного ускорений
Как видно из последнего графика,- линейное ускорение не играет существенной роли в суммарном ускорении, так как центробежное ускорение находится в квадратичной зависимости от величины линейной скорости.
Но примечательно здесь то, что линейное ускорение совершенно симметрично относительно оси проходящей через 90 градусов.
Поэтому в суммарном ускорении системы состоящей из двух соосных или симметричных противофазных маятников, отсутствуют составляющие вызывающие боковые смещения. То есть, несмотря на вращательный характер движения грузов, результирующая сила имеет линейный, однонаправленный характер.
Теперь о зависимости результирующих ускорений системы от порождающих их линейных ускорений грузов. Примем радиус вращения грузов за единицу, массу каждого груза за единицу, а полную массу системы, состоящей из двух грузов и окружающих их механизмов и полезного груза за 16 единиц (то есть полная масса системы в 8 раз больше массы грузов). Полный цикл движения грузов (разгон плюс торможение) примем равным 35 секундам. Тогда ускорения грузов равные 0.01 единицы длины в секунду в квадрате, будут вызывать в десять раз большие ускорения системы в моменты прохождения грузов через ось симметрии (90 градусов). Ускорения грузов равные 0.1 единицы, будут приводить к стократным ускорениям системы. А ускорения грузов равные 1 единице, будут вызывать тысячекратное ускорение системы.
Заканчивая с первой частью раздела посвященного возвратно-вращательному движению, отметим, что приоритет на возвратно-вращательный движитель "Инертор" принадлежит Э.И.Линевичу, который представил геометрическое обоснование его работы опираясь на законы Ньютона.
"Инертор" отличается от изобретенного в 1930 году В.Н.Толчиным механизма “Инерциоид”, использовавшего однонаправленное вращательное движение с переменной угловой скоростью. Как мы уже отмечали - однонаправленное вращение приводит к возникновению противоположно направленных ускорений, которые приходится компенсировать.