Коллеги, продолжаем работу над автопилотом. Сегодня перед нами стоит задача считать, и интерпретировать показания магнитометра(в моем случае HMC5983, но код будет работать и с HMC5883), еще, с помощью данных от акселерометра, нужно нивелировать «дрейф нуля» гироскопа, применив для этого Комплиментарный фильтр. Видео версия выпуска на нашем канале YouTube
Коллеги, продолжаем работу над автопилотом.
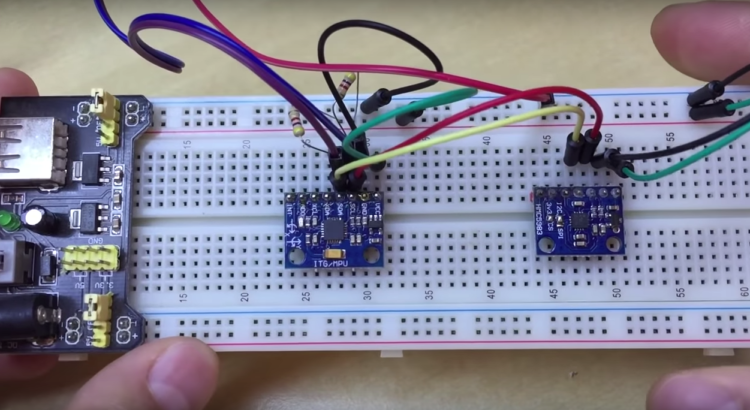
Сегодня перед нами стоит задача считать, и интерпретировать показания магнитометра(в моем случае HMC5983, но код будет работать и с HMC5883), еще, с помощью данных от акселерометра, нужно нивелировать «дрейф нуля» гироскопа, применив для этого Комплиментарный фильтр.