Когда работаешь с дронами, рано или поздно сталкиваешься с ситуацией, когда что-то не работает. Серво дергается, мотор не крутится, а может и вообще ничего не реагирует. И вот вы сидите, держите в руках блок электроники, и понимаете — а как это проверить без сборки всей конструкции? Вот тут-то и вступает в игру сервотестер.
Недавно у нас появился в арсенале восьмиканальный тестер от ToolkitRC. Прибор интересный, компактный, и главное — универсальный. Давайте разберемся, что он умеет и зачем вообще такой девайс в ящике с инструментами.

Сервотестер ToolkitRC: что это вообще такое?
Сервотестер — это прибор, который генерирует управляющий сигнал для сервоприводов, регуляторов скорости и чего угодно, что понимает ШИМ (Широтно-Импульсная Модуляция) или на английском PWM (Pulse Width Modulation). Проще говоря — он имитирует сигнал от полетного контроллера.
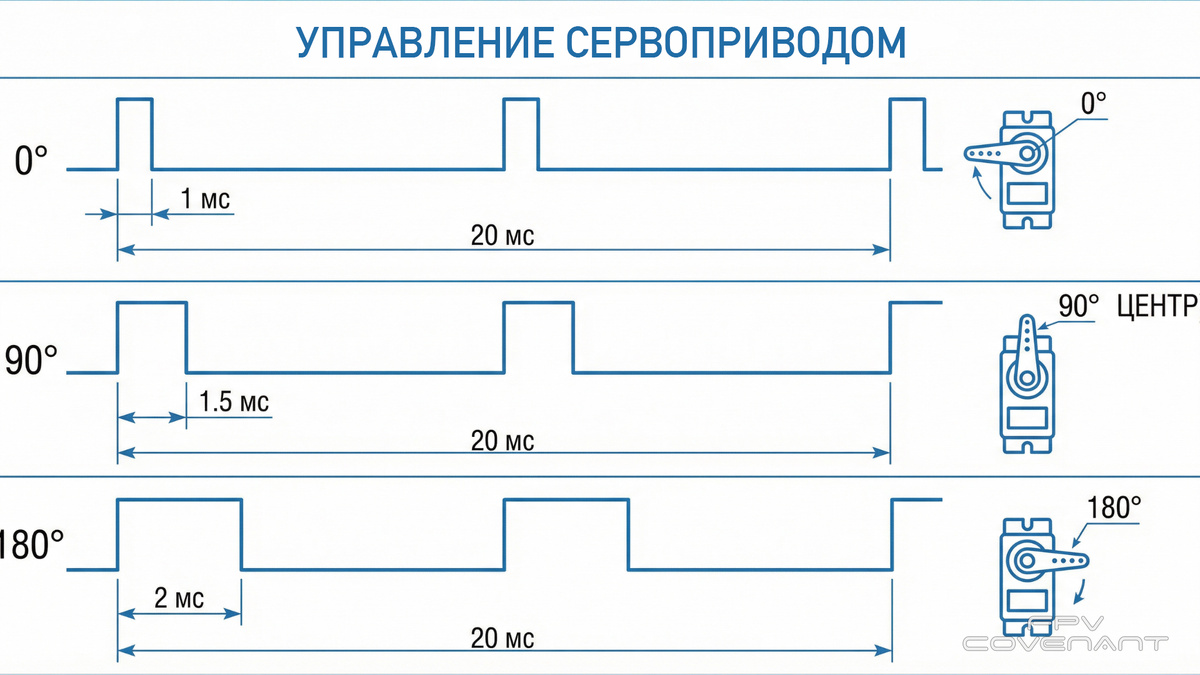
Принцип простой. В мире радиоуправляемых моделей почти всё управляется одним и тем же сигналом. Это последовательность импульсов длиной от 1 до 2 миллисекунд, повторяющаяся 50 раз в секунду. 1 миллисекунда — это минимум (серво повернуто влево, мотор выключен), 2 миллисекунды — максимум (вправо, полный газ). Всё между — рабочая зона.
Тестер просто генерирует этот сигнал и дает менять его вручную. Крутилка, кнопки, дисплей — и можно полностью контролировать подключенное устройство, не собирая при этом всю модель. Главное удобство в том, что можно проверить конкретные вещи. Центровка серво, диапазоны, отсутствие заеданий, реакцию на крайние положения. Для моторов — правильность инициализации, равномерность работы на разных режимах газа, отсутствие странных звуков.
Сервотестер ToolkitRC: проверка сервопривода — пошагово
Начнем с простого — серво. Это самый распространенный компонент в радиоуправляемой технике, и проверить его полезно заранее, особенно если это б/у деталь снятая с найденного дрона.
Подключаем серву к тестеру тремя проводами. Сигнал (обычно желтый или оранжевый) — в канал, плюс и минус соответственно. Важно не перепутать полярность, хотя большинство современных серво имеют защиту от дурака. Включаем тестер, и серва тут же занимает центральное положение.
Теперь начинаем крутить колесико. Сервопривод плавно двигается в одну сторону, потом в другую. Всё плавно, без рывков и странных звуков.
Что именно проверяем? Механику — нет ли заеданий, люфтов, странных скрипов. Диапазон — серва должна проходить полный ход от края до края, обычно это девяносто или сто двадцать градусов в зависимости от модели. Центровку — при значении 1.5 мс вал должен стоять примерно посередине. Если серва греется, пищит или дергается — в корзину.
Неплохой момент — проверка цифровых и аналоговых серв. Цифровые обычно удерживают позицию жестче и могут пищать под нагрузкой — это нормально. Аналоговые более мягкие в поведении. Тестер поможет понять тип и состояние без всякого дополнительного оборудования.
Сервотестер ToolkitRC: проверка мотора тяжелого дрона
Собирая тяжелый дрон важно заранее убедиться в исправности моторов, чем при окончании сборки искать неисправность, если один из двигателей не запустится.
При тестовом запуске пропеллеры снимаем. Это не шутка, это реальный риск получить травму.
Для питания мотора мы будем использовать лабораторный блок питания. Он сработает как предохранитель, если будет короткое замыкание на обмотках двигателя или неисправность регулятора оборотов.
ВАЖНО — правильный порядок включения:
- Сначала включаем сервотестер и выставляем минимальный сигнал (колесико влево до упора);
- Затем включаем питание регулятора оборотов (лабораторный блок питания);
- Регулятор проведет инициализацию — серия писков, затем короткий подтверждающий писк;
- Регулятор «заармился» и готов раскручивать мотор.
Если не выставить минимум перед включением питания, регулятор может не заармиться. Некоторые просто не будут реагировать на команды газа, другие уйдут в ошибку и пищат непрерывно.
Вращаем колесико тестера с минимума. Мотор начинает плавно крутиться. Слушаем звук — равномерный, без странного треска. Увеличиваем газ — мотор набирает обороты, реакция должна быть плавной и предсказуемой. Убавляем — плавно сбрасывает.
Калибровка диапазона — если запуск не прошел:
Если регулятор новый или с неизвестной историей, ему нужно «показать» полный диапазон сигнала. Делается один раз:
- Выставляем на тестере максимальный сигнал (колесико вправо до упора);
- Подаем питание на регулятор;
- Ждем характерный высокий писк (ESC запомнил максимум);
- Быстро крутим колесико на минимум (влево до упора);
- Ждем подтверждающий писк (регулятор запомнил минимум);
- Всё, диапазон калиброван.
После калибровки регулятор будет правильно реагировать на весь диапазон газа от тестера или пульта.
Что мы можем проверить такой методикой? Во-первых, работает ли мотор вообще. Во-вторых, регулятор правильно понимает сигнал и не уходит в защитный режим. В-третьих, нет механических проблем — заеданий, биения, посторонних звуков. В-четвертых, диапазон газов корректный — от минимального газа, достаточного для стабильного вращения, до максимума, когда мотор развивает полную мощность.
Если всё хорошо, можно переходить к дальнейшей сборке дрона. Если где-то есть проблема — вы это поймете сейчас, а не когда мотор уже на раме и к нему не подобраться.
Сервотестер ToolkitRC: нужен или нет
Сервотестер — это не обязательная вещь для каждого, но полезная для любого, кто увлекается сборкой дронов. Удобный, функциональный, экономит время и нервы.
В конце концов, лучше потратить пять минут на проверку на стенде, чем потом разбираться, почему серва с улетевшим дроном неотработала. Или потратив огромное время на сборку дрона думать, почему один двигатель не запускается - проблема в моторе или неправильных настройках.