Автоматизация долгое время воспринималась как волшебная таблетка для отраслей, требующих масштабирования и увеличения производства. Фактически, она дает множество преимуществ – она может сделать повторяющиеся операции быстрее и эффективнее, снизить зависимость от ручного труда и минимизировать эксплуатационные расходы. Сегодня ИИ еще больше расширяет эти возможности. Больше не фантазия, что будущая работа будет партнерством между людьми, системами ИИ и роботами.
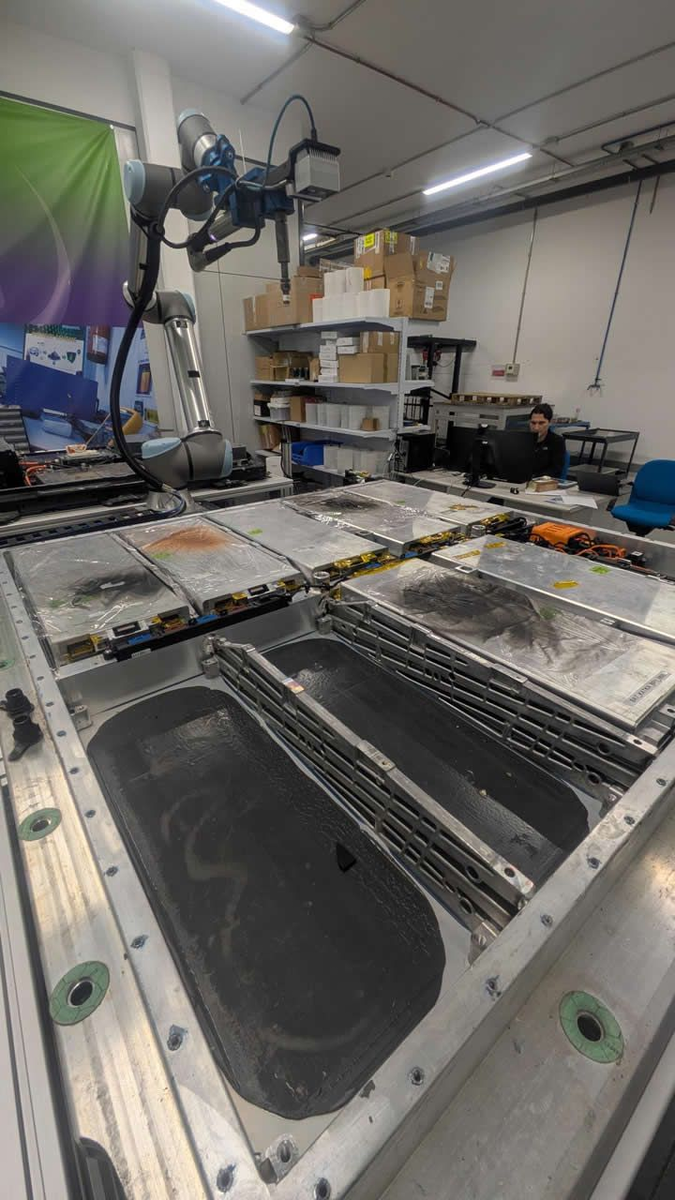
Но не все отрасли одинаковы. Формирующаяся циркулярная экономика создает новые вызовы и новые области применения, где необходима автоматизация. Одна из них — разборка аккумуляторов электромобилей. В отличие от традиционных промышленных сред, разборка батарей работает без стабильной геометрии, согласованных конструкций или надежных данных.
Это смещает проблему с исполнения на адаптацию: не как автоматизировать процесс, а как заставить автоматизацию работать в системе, где никакие два входных параметра не совпадают. Несколько европейских проектов, финансируемых по программе Horizon Europe — включая RECIRCULATE, REBELION, REINFORCE и BATTEREVERSE — активно работают над этой задачей. Мы поговорили с экспертами из Бирмингемского университета, Центрального университета прикладных наук, Университета Астона, Comau и Технологического центра Eurecat, чтобы собрать их взгляды на последние технологические достижения, а также на ключевой достигнутый прогресс и сохраняющиеся проблемы.
Ключевые проблемы все еще не решены

Ключевые проблемы автоматизации разборки батарей проистекают не из отсутствия технологий, а из природы самой системы. В рамках многочисленных отраслевых и исследовательских инициатив эксперты постоянно указывают на экстремальную изменчивость конструкции батарей как на основное препятствие. Различия в геометрии, крепежных системах и внутренней архитектуре в сочетании с отсутствием стандартизации затрудняют обобщение роботизированных процессов для разных типов батарей.
Как объясняет Алиреза Растегарпанах, доцент по робототехнике и соруководитель проекта REBELION: «одной из главных проблем является разнообразие конструкций батарей, а отсутствие стандартов делает роботизацию процесса гораздо более сложной».
Вот почему эта область все больше движется к работе в неограниченных средах, где системы должны адаптироваться к неизвестным входным данным, а не полагаться на предопределенные настройки. Как отмечает Растам Столкин, профессор, председатель по робототехнике Бирмингемского университета, основатель и директор Лаборатории экстремальной робототехники: «мы движемся к системам, которые могут функционировать в неограниченных средах, где робот должен иметь дело с неизвестными объектами и условиями».
Эта изменчивость напрямую влияет на масштабируемость. Вместо повторяющихся процессов каждая новая батарея часто требует дополнительных усилий по программированию, валидации и проектированию. Как выражается Джампьеро Пупилло, инженер по автоматизации, Comau, представляющий проект REINFORCE: «традиционная автоматизация отлично работает в повторяющихся средах, но разборка батарей — это противоположность: нет стабильной привязки, нет гарантированной геометрии, нет согласованности». Предприятия по переработке работают в изначально нестабильных условиях, обрабатывая гетерогенную смесь батарей, часто поврежденных или деформированных и без надежных предварительных данных, что нарушает основные предположения, на которых строится традиционная автоматизация.
Помимо изменчивости на системном уровне, материалы и конструкция компонентов добавляют дополнительные уровни сложности. Некоторые элементы остаются inherently сложными для роботизированного обращения. Как отмечает Томи Питкяахо, доктор философии, главный лектор по исследованиям, Центральный университет прикладных наук: «одна из самых сложных задач — удаление жгута проводов. Он очень деформируемый — и это делает его очень сложным для обработки роботами». Гибкие компоненты, в отличие от жестких деталей, нарушают предположения о предсказуемом манипулировании и требуют гораздо более совершенных стратегий сенсорики и управления. Выбор материалов еще больше усложняет процесс: клеи (широко используемые в конструкции батарей) создают значительные препятствия для разборки, иногда требуя нетрадиционных подходов, таких как замораживание склеенных компонентов жидким азотом.
Еще одним критическим ограничением является отсутствие структурированных и доступных данных о батареях. Во многих случаях команды вынуждены полагаться на косвенные методы сенсорики, такие как комбинирование RGB- и тепловизионных изображений, или даже на синтетические наборы данных, чтобы компенсировать отсутствие реальной информации. В то же время ведутся усилия по созданию наборов данных на уровне компонентов, которые могут поддерживать как автоматизацию, так и прослеживаемость. Как подчеркивает Алиреза Растегарпанах, такие наборы данных необходимы не только для робототехники с компьютерным зрением, но также для обеспечения цифровых паспортов батарей и отслеживания батарей на протяжении всего их жизненного цикла — от производства до окончания срока службы и возможного вторичного использования. Однако, как указывает Оскар Паласин, исследователь, менеджер проектов R+D+i, Технологический центр Eurecat, текущее отсутствие высококачественных данных значительно ограничивает эти усилия и отражает то, насколько ранней стадии все еще находится эта область.
Еще одна критическая проблема, выделенная во всех проектах, — это доступность данных. Во многих случаях доступ к надежным данным о батареях, в частности о состоянии здоровья (SoH), остается ограниченным. В результате, если состояние батареи не может быть определено, ее обычно направляют на переработку, а не на повторное использование, независимо от ее оставшегося потенциала. Это делает данные не просто техническим фактором, а ключевым узким местом, которое все еще трудно преодолеть на практике.
Эти проблемы не новы. С самого начала было ясно, что разборка батарей inherently сложна: батареи значительно различаются по конструкции, включают опасные и чувствительные материалы и никогда не были созданы с учетом разборки. Эти проблемы постоянно подчеркивались в исследованиях и промышленности, и они остаются не полностью решенными. Однако это не означает, что прогресс остановился. Напротив, исследования активно продвигаются, и недавние проекты демонстрируют значимые результаты.
Что автоматизация уже может дать
Несмотря на все вышеупомянутые ограничения, прогресс ощутим.
Проект RECIRCULATE разрабатывает автоматизированную систему демонтажа на основе ИИ, направленную на достижение точности классификации более 98% для 20 различных типов батарей и обнаружение 10 классов дефектов с точностью классификации более 99%, при соблюдении строгих временных рамок (менее 60 минут для разборки от пакета до модуля и 120 минут для разборки от модуля до ячейки).
В результате Центральный университет прикладных наук разработал систему, построенную вокруг промышленного робота KUKA KR 10, установленного на линейном модуле, оснащенного несколькими концевыми эффекторами для разных задач (гайковерт для винтов, вакуумный захват для крышек и пластин, а также захват Schunk со специальными губками для кабелей и разъемов). Система полагается на шесть моделей машинного обучения, включая идентификацию батареи, обнаружение дефектов (например, проколов, вмятин, термических повреждений, отсутствующих компонентов) и распознавание компонентов.
Ключевым преимуществом таких систем является возможность повторно использовать знания.
«Если мы можем идентифицировать батарею и понять, что мы разбирали этот тип раньше, мы можем повторно использовать ту же стратегию разборки», — говорит Томи Питкяахо.
Система представляет собой гибридный подход: этап от пакета до модуля управляется ИИ, что позволяет идентифицировать и повторно использовать стратегии разборки для известных типов батарей, в то время как этап от модуля до ячейки остается основанным на приспособлениях.
В целом, проект демонстрирует работающую концепцию: высокоточная, поддерживаемая ИИ разборка батарей достижима благодаря комбинации робототехники, машинного обучения и структурированного системного проектирования.
В рамках проекта REBELION Бирмингемский университет руководит работами по автоматизации и робототехнике, фокусируясь на гибких, исследовательских (низкий уровень технологической готовности, TRL) решениях, в то время как такие партнеры, как UPV, работают над более практичными реализациями с более высоким TRL, включая частично автоматизированную разборку легких аккумуляторов EV, сочетающую ручные операции с робототехникой под управлением компьютерного зрения.
Как упомянул Растам Столкин, ключевой фокус работы Бирмингема — обеспечить возможность роботам работать с сильно различающимися и неизвестными типами батарей. Чтобы решить эту задачу, команда разрабатывает адаптивный цифровой двойник, интегрирующий данные в реальном времени от систем зрения, симуляций и физических роботов для планирования, синхронизации и выполнения сложных операций. Система поддерживает несколько режимов взаимодействия — от полной автономии до телеоперации на основе VR/AR и управления с участием человека, включая тактильную обратную связь, которая позволяет операторам «чувствовать» задачу удаленно в опасных средах.
На стороне восприятия и манипуляции REBELION фокусируется на распознавании батарей и компонентов в загроможденных средах и обобщаемом захвате неизвестных объектов. Примечательно, что вместо использования нейронных сетей система использует геометрические методы, обеспечивая быстрое и надежное обращение с ранее не встречавшимися компонентами. Проект также разрабатывает возможности автономной резки, где робот строит 3D-модель в реальном времени, планирует и симулирует траекторию реза и выполняет ее под наблюдением человека.
Дальнейшие работы включают системы совместного управления, где ИИ предлагает оптимальные действия (например, точки захвата), в то время как оператор-человек сохраняет контроль, а также многороботную координацию, позволяющую нескольким роботам разделять задачи и избегать столкновений в реальном времени. Недавние эксперименты также изучают использование больших языковых моделей (LLM), позволяя неэкспертам управлять роботами с помощью команд на естественном языке. Наконец, REBELION масштабирует эти подходы для тяжелых роботизированных систем, способных обрабатывать большие батарейные пакеты (до ~500 кг). Это вводит дополнительные проблемы, связанные с безопасностью, управлением и системной интеграцией, которые мы решаем по ходу проекта.
Проект BATTEREVERSE применяет подход к обратной переработке батарей на основе полного жизненного цикла, объединяя данные, автоматизацию и ИИ в единую систему. Он начинается со сбора данных о батарее для создания цифрового паспорта батареи, включающего информацию о химическом составе, состоянии и истории использования, за которым следует комбинированный процесс разряда, оценки SoH и безопасной деактивации, поддерживаемый решениями для безопасной упаковки.
Оттуда батареи направляются либо на переработку, либо на пути повторного использования. На стороне переработки проект фокусируется на полуавтоматической роботизированной разборке и сортировке на основе компьютерного зрения, в то время как повторное использование полагается на акустическую диагностику и машинное обучение для оценки оставшегося полезного срока службы и определения вариантов вторичного применения. Все этапы связаны через цифровой двойник, позволяющий моделировать и оптимизировать обратную логистику и операции.
Ключевым компонентом является совместная роботизированная разборка, где роботы выполняют такие задачи, как откручивание с использованием систем зрения и адаптивных инструментов, а коллаборация человека и робота обрабатывает изменчивость и исключения. Параллельно мультимодальная инспекционная система (RGB + тепловидение) обнаруживает аномалии и обеспечивает безопасность, в то время как синтезирование данных используется для компенсации отсутствия реальных данных о дефектах при обучении моделей ИИ.
В целом, проект демонстрирует масштабируемую системную архитектуру, которая сочетает робототехнику, инспекцию на основе ИИ и интеграцию данных. Однако он также подтверждает более широкое понимание в отрасли: хотя автоматизация разборки и инспекции батарей технически достижима, ее масштабируемость остается ограниченной изменчивостью, оставляя открытым вопрос, будет ли эта проблема решена за счет прогресса в ИИ, системном проектировании, стандартизации или продолжающегося участия человека в цикле.
В то время как эти проекты подходят к проблеме с разных сторон — от системной интеграции до адаптивной робототехники и оптимизации жизненного цикла — все они в конечном итоге решают одну и ту же основную задачу: как заставить автоматизацию работать в условиях экстремальной изменчивости. Вместе они обеспечивают 360-градусный обзор проблемы, показывая, что ни одного решения недостаточно, но прогресс возникает из комбинирования наиболее эффективных подходов в области робототехники, ИИ и системного проектирования.
Что дальше: Масштабируемость, гибридные системы, ИИ и LLM
Джампьеро Пупилло утверждает, что фокус на замене ручного труда несколько вводит в заблуждение. «Когда мы говорим об автоматизации в переработке батарей, основное внимание уделяется замене ручных операций. Но это не реальная проблема».
По его словам, отрасли необходимо подходить к проблеме на двух уровнях — аппаратном и программном, причем программный уровень потенциально играет более критическую роль в обеспечении масштабируемости. Именно здесь становятся актуальными low-code подходы. Подход Comau основан на разработке минимального набора повторно используемых строительных блоков, которые могут применяться для таких задач, как зрение, манипулирование и завинчивание. Однако реализация остается сложной, так как программирование и ввод в эксплуатацию должны учитывать широкий диапазон внешних переменных.
Развивая эту идею, Растам Столкин из Бирмингемского университета описывает тесно связанную концепцию «примитивов действий». В этой структуре роботы оснащены обобщенными действиями — такими как откручивание, резка, захват или перемещение — которые могут применяться к разным объектам и средам. Система зрения идентифицирует специфические для задачи элементы (например, винт в заданном месте) и сопоставляет их с этими предопределенными действиями.
Кодируя такие действия обобщаемым способом, системы могут повторно использовать их для разных типов батарей. Это создает основу для low-code уровня, где высокоуровневые инструкции — такие как определение позиций для откручивания — могут использоваться для адаптации процессов к новым батареям без переписывания всей программы.
В то же время прогресс в ИИ и подходах, управляемых данными, открывает новые возможности — но также обнаруживает новые ограничения. В таких проектах, как REBELION, большие языковые модели исследуются как планировщики задач, позволяя неэкспертам взаимодействовать с роботизированными системами с помощью естественного языка. Однако, как отмечает Алиреза Растегарпанах, эти подходы остаются вычислительно интенсивными и их трудно развернуть в системах реального времени с замкнутым контуром.
Аналогично, хотя модели компьютерного зрения (например, системы на основе YOLO) широко используются для обнаружения и локализации объектов, основные задачи манипуляции, такие как планирование захвата и резка, часто все еще основаны на геометрических методах, а не на обученных моделях. Как объясняет Растам Столкин, это позволяет системам надежно работать с неизвестными объектами без необходимости в больших обучающих наборах данных. Вопрос доступности данных остается критическим. Хотя некоторые наборы данных были опубликованы, большинство остаются ограниченными по охвату, а крупномасштабные высококачественные наборы данных все еще в значительной степени недоступны. Даже доступ к эксплуатационным данным батарей (например, данным BMS) зависит от сотрудничества производителей, как подчеркнул Томи Питкяахо.
Исследовательские команды все чаще отходят от идеи полностью автономных систем как конечной цели. Вместо этого гибридные модели набирают популярность. Растам Столкин описывает спектр подходов, сочетающих автоматизацию с участием человека: «Некоторые задачи могут быть полностью автоматизированы, но другие слишком сложны или слишком изменчивы. Вот почему мы исследуем системы, где люди остаются в цикле».
Эти системы варьируются от телеоперации до совместного управления, где люди направляют или вмешиваются в роботизированные процессы при необходимости. В рамках проектов вырисовывается схожая закономерность: масштабируемость достигается не за счет устранения роли человека, а за счет ее переопределения в гибридных средах, которые сочетают робототехнику, ИИ и человеческое суждение.
Это имеет более широкие последствия, чем просто технический выбор. В сильно изменчивых системах, таких как разборка батарей, полная автоматизация может быть не только сложной — она может быть и не нужной. Значительная доля операций уже может быть упрощена и автоматизирована сегодня, в то время как другие остаются inherently немасштабируемыми или неэффективными для автоматизации. Таким образом, стратегический фокус смещается на масштабирование того, что масштабируется, и проектирование систем, которые интеллектуально сочетают автоматизацию с человеческим вмешательством там, где оно добавляет наибольшую ценность.
Резюме
Автоматизация разборки батарей больше не является вопросом технической осуществимости — она уже происходит, как демонстрируют несколько европейских проектов. Реальная проблема заключается в ее масштабировании в условиях неопределенности, изменчивости и неполных данных.
Пока конструкции батарей остаются нестандартизированными, автоматизация не может полагаться только на повторение. Вместо этого она должна быть построена вокруг гибкости — сочетая модульное программное обеспечение, восприятие на основе ИИ и подходы с участием человека в цикле. Это меняет парадигму: цель состоит не в том, чтобы автоматизировать всё, а в том, чтобы масштабировать то, что масштабируется, и интегрировать человеческое суждение там, где оно остается необходимым.
Таким образом, отрасль движется не к полной автономии, а к адаптивным гибридным системам. В этом контексте ключевой вопрос больше не в том, возможна ли автоматизация, а в том, как проектировать системы, которые могут масштабироваться в средах, сопротивляющихся стандартизации по своей сути.
О нашей компании
TITAN 3D - поставщик и системный интегратор оборудования для роботизации, 3D-сканирования, 3D-печати и автоматизированного контроля в промышленности, машиностроении, медицине.
Готовы ответить на все Ваши вопросы, проконсультировать по оборудованию, и подобрать лучшее оборудование для решения Ваших задач.
Каталог роботов мировых производителей - проработку технологии, подбор оборудования, внедрение, пусконаладку и обучение берем на себя!
+7 (952) 243-77-75 I 01@titan-3d.ru I www.titan-3d.ru