Вечер. За окном привычная питерская морось, ветер гоняет по двору мокрые листья, а у меня в мастерской тепло, пахнет разогретым пластиком и мерно, на высоких частотах поют шаговые двигатели. Я сижу, пью горячий чай, смотрю на стремительно летающую внутри кубического корпуса печатающую голову своего нового принтера и вспоминаю, с чего всё начиналось.
Буквально вчера я проектировал очередное обновление для своего телеграм-бота MakerConvert, тестировал конвертацию сложных векторных контуров для лазерного гравера, а заодно решил распечатать физическую тестовую модель. Идеальный круг, вписанный в квадрат, с жесткими допусками. Принтер выплюнул деталь за двадцать минут. Я взял штангенциркуль, промерил диагонали — идеально. Круг — это круг. Квадрат — это квадрат.

И тут на меня накатила волна ностальгии. Ведь еще лет восемь назад такая простая задача, как печать геометрически правильного круга на высокой скорости, была настоящей лотереей, если вы собирали кубический принтер своими руками. И виной всему была грандиозная инженерная драма — битва двух кинематик, которая расколола сообщество мейкеров на два непримиримых лагеря.
Сегодня мы с вами поговорим о том, почему индустрия окончательно, бесповоротно и жестко сделала ставку на CoreXY, и почему H-bot, несмотря на свою первоначальную популярность и гениальную простоту, отправился на свалку истории технических курьезов. Это будет долгий, обстоятельный разговор о физике, механике и боли ошибок, но я обещаю: никаких скучных формул и университетских лекций. Только здравый смысл и опыт, набитый на собственных мозолях.
Эволюция "Дрыгостолов": как мы пришли к кубикам
Чтобы понять суть конфликта, нужно сделать небольшой шаг назад, в те времена, когда деревья были большими, а 3D-принтеры собирались из строительных шпилек и фанеры.
Долгие годы королем домашней 3D-печати был так называемый "дрыгостол" — кинематика имени Йозефа Прюши (Prusa Mendel, Prusa i3 и легион их китайских клонов). Принцип прост до безобразия: печатающая голова ездит влево-вправо (по оси X) и вверх-вниз (по оси Z), а тяжелый стол с деталью катается туда-сюда (по оси Y).
Для медленной печати PLA-пластиком это работало отлично. Но аппетиты росли. Нам захотелось печатать быстро. Нам захотелось использовать тяжелые директ-экструдеры. Нам захотелось закрытых термокамер, чтобы печатать капризным ABS или нейлоном без расслоений.
И тут "дрыгостол" уперся в законы физики. Когда вы пытаетесь резко дергать тяжелый стол с массивной стеклянной поверхностью и растущей на ней деталью, возникает колоссальная инерция. Принтер начинает раскачиваться, на стенках деталей появляются уродливые волны (эхо или гостинг), а на высоких скоростях шаговые двигатели просто теряют шаги.
Стало очевидно: стол должен двигаться только медленно и печально вниз (по оси Z), а печатающая голова, легкая и юркая, должна летать в горизонтальной плоскости (X и Y) по верхней части принтера. Так мейкеры начали массово переходить на принтеры с кубической рамой. И здесь встал главный вопрос: как именно заставить голову летать по осям X и Y, используя минимум моторов и получая максимум скорости?
На сцену вышли они: H-bot и CoreXY.
Очарование H-bot: гениальная простота, покорившая массы
Когда я впервые увидел схему H-bot, я был в восторге. Это казалось триумфом минимализма.
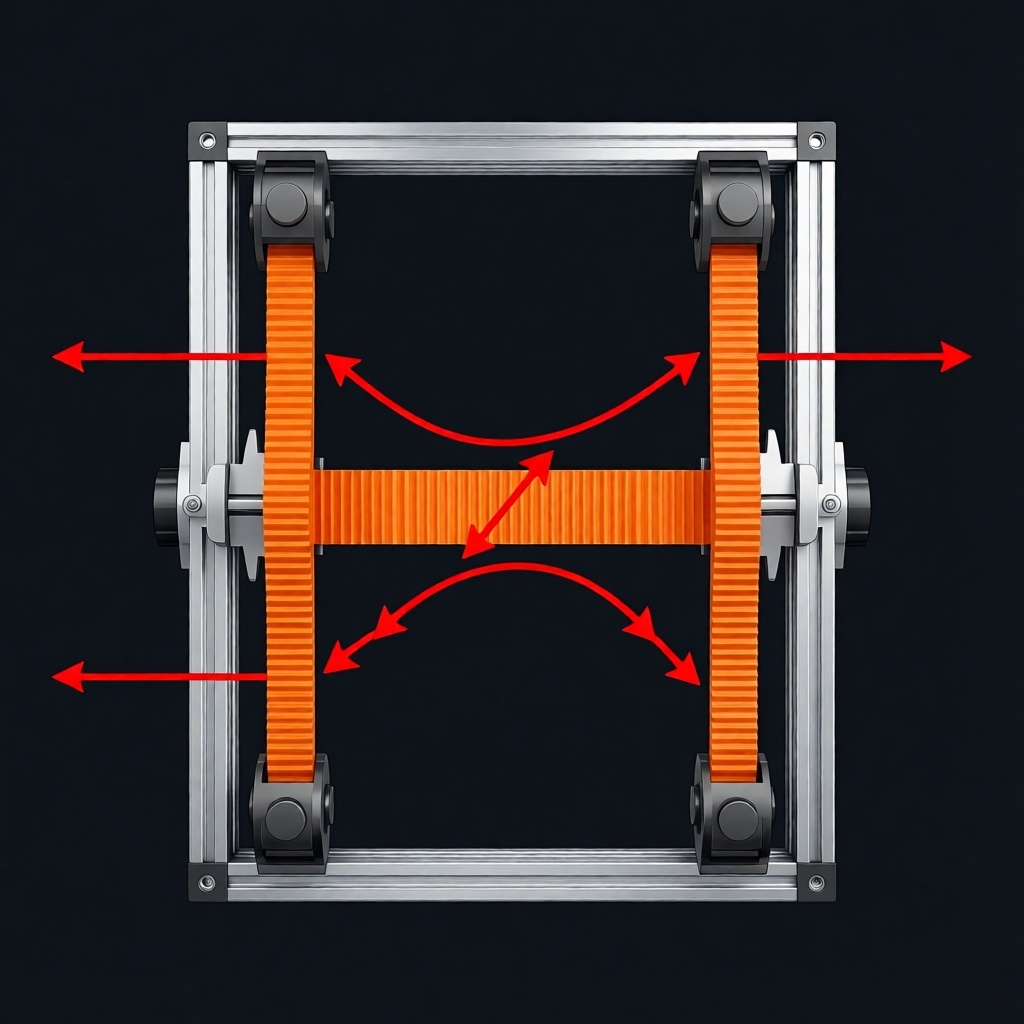
Представьте себе букву «Н». Вертикальные палочки — это направляющие оси Y. Горизонтальная перекладина — это балка оси X, по которой катается печатающая голова.
В кинематике H-bot используется всего один длинный зубчатый ремень, который уложен в форме этой самой буквы «Н». По углам рамы стоят ролики, а сзади (или спереди) закреплены два неподвижных шаговых мотора. Ремень выходит из одного мотора, пробегает по периметру, цепляет каретку печатающей головы, проходит по балке, возвращается и заходит во второй мотор.
Как это работает на практике?
Если оба мотора крутятся в одну сторону, ремень тянет балку целиком вперед или назад.
Если моторы крутятся в разные стороны, балка стоит на месте, а ремень тянет каретку влево или вправо.
А если крутится только один мотор, голова движется по диагонали.
Это казалось идеальным решением! Моторы, самые тяжелые элементы системы, убраны с подвижных частей и жестко прикручены к раме. Балка оси X получается легкой. Ремень всего один, натягивать его легко (потянул за один конец, затянул винтом — и готово). Сборка такого принтера занимала минимум времени. Детали для кареток печатались за вечер.
В середине десятых годов форумы просто взорвались проектами на H-bot. Все массово пилили фанеру, резали алюминиевый профиль и собирали эти машины. Но эйфория длилась ровно до того момента, пока дело не доходило до первой реальной, точной печати.
Анатомия катастрофы: почему H-bot рисует овалы
Помню, как однажды Даринка попросила меня напечатать красивую, идеально ровную цилиндрическую шкатулку с плотно прилегающей крышкой по типу резьбового соединения. Я тогда как раз тестировал свежесобранный H-bot. Нарисовал модель, отслайсил, запустил. Принтер бодро отжужжал пару часов. Я снимаю шкатулку, снимаю крышку, пытаюсь закрутить... а она не закручивается.
Присмотрелся, промерил: и шкатулка, и крышка были не круглыми. Они были овальными. Причем овалы были вытянуты по диагоналям.
Это был момент столкновения с суровой, безжалостной физикой, которую не обманешь красивой концепцией одного ремня. Главная, фатальная, неустранимая проблема H-bot заключается в распределении сил.
Давайте разберем это так, чтобы было понятно абсолютно каждому. Представьте снова нашу балку (перекладину буквы «Н»). Когда печатающей голове нужно поехать, например, вправо по оси X, моторы начинают тянуть ремень. Но ремень-то расположен хитро! Он тянет каретку на балке в одну сторону, а точки крепления ремня к самой балке на концах — испытывают усилие в противоположную сторону.
Возникает так называемый вращающий момент. Силы пытаются развернуть балку оси X вокруг своей оси. Один конец балки тянет вперед, другой — назад.
В механике это называется «перекос» или «эффект параллелограмма». В идеальном мире математики направляющие абсолютно жесткие, каретки не имеют люфтов, а металл не гнется. В реальном мире гаражной сборки, где мы используем недорогие цилиндрические валы или даже дешевые рельсовые направляющие, любой люфт, любая микроскопическая податливость материала приводит к тому, что балку перекашивает.
Когда принтер рисует круг, он постоянно меняет направление движения осей X и Y. Двигатели дергают ремень то так, то сяк. Балку постоянно «изламывает» по диагоналям. В результате сопло смещается с заданной траектории. И вместо круга вы получаете вытянутое яйцо.
Попытки спасти пациента: почему «лечение» не сработало
Конечно, инженеры и мейкеры — народ упертый. Поняв причину, все бросились исправлять недостаток H-bot. Началась настоящая гонка вооружений, борьба за жесткость, которая в итоге похоронила саму идею.
Логика была простой: если балку перекашивает, значит, она слишком хлипкая. Нужно сделать её жестче!
Вместо тонких 8-миллиметровых валов начали ставить толстые 12-миллиметровые. Вместо одной рельсовой направляющей на сторону ставили мощные широкие рельсы. Каретки делали из фрезерованного алюминия толщиной в палец.
И знаете что? Это помогало. Овалы становились менее выраженными. Геометрия улучшалась. Но какой ценой!
Балка оси X превратилась в неподъемного монстра. Из-за огромного веса рельс и массивных металлических креплений инерция подвижной части возросла кратно. Чтобы таскать эту тяжеленную железяку на приличных скоростях, приходилось ставить гигантские шаговые моторы, которые потребляли кучу тока и грелись, как утюги. Если же пытались печатать быстро, тяжелая балка при смене направления устраивала принтеру такое землетрясение, что стол ходил ходуном, а на деталях появлялась жуткая рябь.
Круг замкнулся. Мы ушли от «дрыгостола», чтобы избавиться от таскания тяжестей и увеличить скорость, а в итоге, пытаясь спасти H-bot, пришли к тому, что снова таскаем тяжелую железяку, только теперь не по оси Y, а по оси X. Смысл кинематики был утерян полностью.
Стало ясно, что проблема H-bot — не конструктивная, она архитектурная. Бороться с ней грубой силой бесполезно. Нужно было менять саму схему распределения ремней. И тут на сцену вышел Илан Мойер со своей разработкой — CoreXY.
Явление CoreXY: изящная победа математики над перекосом
На первый взгляд кинематика CoreXY в собранном виде очень похожа на H-bot. Те же два мотора сзади, те же направляющие по периметру. Но если присмотреться к тому, как уложены ремни, мозг новичка может закипеть.
Ремней здесь два. Они длинные, они хитрым образом пересекаются (обычно в форме буквы X на задней стенке или идут на разных уровнях, чтобы не тереться друг об друга), и они огибают всю раму, образуя сложный, замкнутый контур.
Когда я впервые собирал свой первый CoreXY, я минут сорок сидел с распечатанной схемой, пытаясь понять, какой конец ремня куда заводить. Это казалось избыточным усложнением. Но стоило мне закончить, натянуть ремни и сдвинуть каретку рукой, как я всё понял. Это была магия.
Суть гениальности CoreXY заключается во взаимной компенсации сил.
Давайте вернемся к нашей проблеме перекоса балки. В CoreXY, когда моторы тянут ремни, чтобы сдвинуть каретку, оба ремня работают одновременно. И их геометрия выстроена так, что если на один конец балки действует сила, тянущая его вперед, то на другой конец балки действует точно такая же сила, создаваемая вторым ремнем, тянущая его тоже вперед!
Силы, которые в H-bot пытались развернуть и сломать балку, в CoreXY уравновешивают друг друга. Возникает идеальный баланс. Векторы сил направлены строго вдоль направляющих.
Что это дало на практике? Это перевернуло игру.
Вам больше не нужна чугунная рельса толщиной с руку, чтобы бороться с перекосом. Вы можете использовать легчайшие карбоновые трубки в качестве балки оси X! Вы можете использовать крошечные, невесомые каретки. Печатающая голова становится легкой, как перышко.
А раз нет огромной массы подвижных частей, значит, нет инерции. А раз нет инерции, вы можете разгонять принтер до безумных скоростей. При этом он будет выписывать идеальные круги, квадраты и многоугольники, не перекашиваясь ни на микрон. Математика победила грубую силу металла.
Почему индустрия сделала ставку на CoreXY именно сейчас?
Вы можете спросить: если CoreXY так хорош, почему он не захватил мир сразу, еще десять лет назад? Ответ кроется в электронике и софте.
Ранние 8-битные платы, на которых работали первые самоделки, с трудом переваривали математику CoreXY. Помните, я говорил, что там всё движется по диагоналям? Чтобы голова поехала просто прямо, плате нужно постоянно вычислять сложные пропорции вращения обоих моторов одновременно. Старые платы просто захлебывались от вычислений на высоких скоростях, принтер начинал заикаться и тормозить.
Но потом произошли две революции.
Первая — появление дешевых и мощных 32-битных плат.
Вторая, и самая главная — появление прошивки Klipper.
Klipper вынес все сложные математические расчеты с хилой платы принтера на мощный процессор микрокомпьютера (типа Raspberry Pi). Но и это не всё. В Klipper появилась функция Input Shaper (компенсация резонансов). Специальный датчик измеряет частоту вибрации принтера при движении, и прошивка заранее корректирует шаги моторов так, чтобы эту вибрацию погасить.
И вот тут CoreXY раскрылся на все сто процентов. Легкая балка, жесткая кубическая рама, отсутствие перекосов и математическое гашение вибраций позволили разогнать домашние 3D-принтеры до скоростей, которые раньше казались научной фантастикой.
Посмотрите на современный рынок. Проект Voron — икона мирового мейкерства, принтеры, которые собирают гики по всему миру, — это стопроцентный CoreXY.
Посмотрите на коммерческий сектор. Революционный Bambu Lab, который перевернул рынок потребительской 3D-печати и заставил старичков глотать пыль, работает на кинематике CoreXY. Их ответный удар от Creality — линейка K1 — это CoreXY. Qidi, Flashforge — все новые флагманы строятся по этой схеме.
Индустрия сделала свой выбор. Производители поняли: нет никакого смысла бороться с врожденными пороками H-bot, когда есть изящное, легкое и скоростное решение.
Мифы и страшилки: так ли страшен CoreXY в настройке?
Справедливости ради, я должен упомянуть главную претензию, которую до сих пор можно услышать от адептов старых технологий: "CoreXY слишком сложен в сборке, а ремни невозможно настроить!".
Да, это правда, что сборка требует большей концентрации. У вас два длинных ремня. Главное правило этой кинематики: натяжение обоих ремней должно быть абсолютно одинаковым. Если один ремень натянут как струна, а второй провисает, геометрия поплывет, и вы получите тот же самый овал вместо круга, хоть балку и не перекосит физически, но математика софта сойдет с ума.
В первые годы мейкеры придумывали жуткие костыли: натягивали ремни по звуку, бренча на них, как на гитаре (кстати, неплохой метод для музыкантов), скачивали приложения-тюнеры на телефон.
Сегодня эта проблема решена конструктивно. На всех современных принтерах (и самодельных, и заводских) стоят удобные натяжители с винтами. Вы просто отводите голову в центр, ставите телефон с приложением-частотомером рядом с ремнем, дергаете его, как струну, и подкручиваете винт, пока оба ремня не покажут одинаковую частоту в герцах (обычно около 110-150 Гц в зависимости от длины). Вся процедура занимает три минуты. Это ничтожная плата за ту феноменальную скорость и точность, которую вы получаете взамен.
А вот H-bot, несмотря на простоту одного ремня, требовал регулярного обслуживания механики. Из-за постоянных перекосов подшипники на каретках стирались в разы быстрее, рельсы начинали люфтить, и их приходилось регулярно менять. CoreXY в этом плане гораздо более бережно относится к железу. Векторы сил работают правильно, износа на излом нет.
Эпилог: куда отправился H-bot
Означает ли всё это, что кинематика H-bot мертва абсолютно? В мире 3D-печати — да, это абсолютный, безоговорочный труп. Вы не найдете ни одного современного, серийно выпускаемого 3D-принтера на этой механике. В сообществах самодельщиков вас просто поднимут на смех, если вы предложите строить H-bot в 2026 году.
Однако, у него осталась маленькая, узкая ниша. Это лазерные граверы и легкие плоттеры (кстати, именно поэтому в моем проекте MakerConvert я уделяю отдельное внимание конвертации файлов для лазеров, там своя специфика). Лазерный модуль весит граммы. Ему не нужно таскать экструдер, радиатор, мотор податчика и кулачок. В лазерных станках балка оси X практически невесома, а скорости не требуют мгновенных ускорений тяжелых масс. В таких тепличных условиях эффект перекоса минимален, и ради экономии на роликах и втором ремне производители дешевых китайских граверов всё еще используют схему H-bot. Но даже там, как только речь заходит о серьезных, профессиональных СО2-лазерах портального типа, мы снова видим либо классическую декартову систему (каждый мотор на свою ось), либо вариации CoreXY.
Великий спор окончен. Математика оказалась сильнее грубого металла. Инженерия сделала шаг вперед, избавившись от тупиковой ветви. И каждый раз, когда я запускаю печать на скорости в 500 миллиметров в секунду и вижу, как ровно и плавно ложится расплавленный пластик, формируя идеальные окружности, я мысленно говорю спасибо Илану Мойеру за то, что он придумал скрестить эти два ремня.
Выбирайте правильные технологии, не бойтесь сложных на первый взгляд схем, и пусть ваши круги всегда будут круглыми, а адгезия к столу — железной! Делитесь в комментариях: на какой кинематике работает ваш станок прямо сейчас, и скучаете ли вы по временам фанерных "дрыгостолов"?
В Telegram, ВК и Макс я делюсь тем, что не всегда подходит для формата Дзена: бесплатные STL, короткие наблюдения, рабочие заметки и апдейты.
👉 Канал в телеграмм 3Д печатник