Китайские инженеры из Университета Тунцзи в Шанхае создали систему управления движениями MorphoGuard, которая позволяет роботам выполнять сложно координированные действия. Теперь они смогут толкать дверь плечом или открывать её локтем, удерживая в кистевом манипуляторе какой-либо предмет. А ещё переносить тяжелые коробки, удерживая их не только механической пятерней, но и предплечьями. Работа с описание технологии опубликована в хранилище препринтов Корнельского университета.
Одной из ключевых технических проблем в разработке и эксплуатации гуманоидных роботов является создание системы управления всем телом (Whole-Body Control, WBC). В идеале её использование должно позволить роботам удерживать равновесие и координировать движения отдельных частей тела (рук, ног и корпуса) при решении практических задач. Для человека легко поднять мешок с картошкой, взвалить на спину, отнести до грузовика и закинуть в кузов. А вот для наших «железных помощников» это пока непосильная ноша.

Даже скоординированные действия одной или двумя роборуками сразу всё ещё вызывают трудности. Ведь большинство современных WBC-систем ориентированы исключительно на концевые манипуляторы — электромеханические кисти, захваты или клешни. Однако в реальной жизни человеку часто приходится задействовать и другие участки конечности: предплечья, локтевые сгибы. По-научному это называется координация движений вдоль единой кинематической цепи, и для роботов до недавнего времени она была недоступна из-за жесткой связанности суставов.
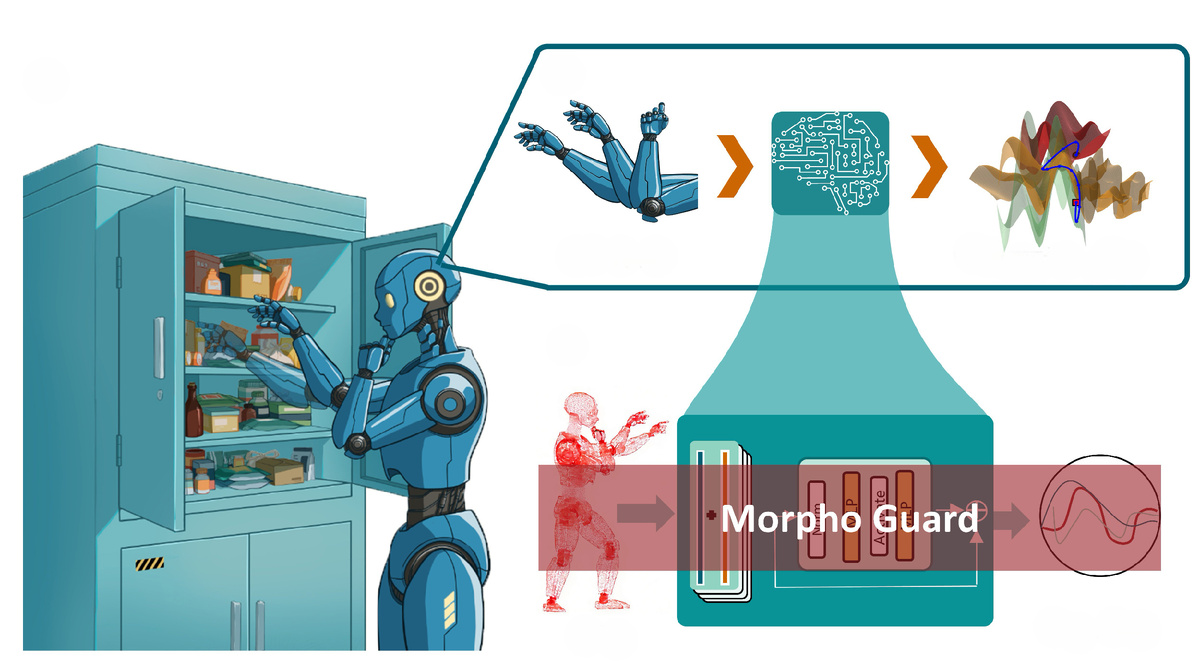
MorphoGuard предлагает оригинальное решение проблемы. Китайские специалисты разделили тело робота на множество «материальных точек» (material points, MPs), каждая из которых связана с датчиком электронной кожи (e-skin). По сути, создаётся облако точек, которое в любой момент времени детально описывает текущую форму робота.
Для обработки полученных данных использовалась нейросеть с энкодером и декодером. Энкодер превращал входную информацию — облако точек, описывающее позу робота — в компактный набор чисел, который называют скрытым представлением или кодом. Это похоже на то, как мы пересказываем длинный фильм одним предложением: теряются детали, но остаётся главное.
Декодер производит обратную операцию: превращает сжатый код в требуемую выходную информацию, например, в набор углов поворота для каждого сочленения сустава робота. При этом декодер «учится» по сжатому коду восстанавливать именно те команды, которые приведут робота из текущей позы в целевую, необходимую для эффективного движения. Обучение нейросети велось на предварительно собранном датасете из 1,3 млн пар «форма – команда сочленениям».
Эффективность обучения проверили в ходе экспериментов. Под управлением MorphoGuard робот успешно перемещал два объекта одновременно, избегая столкновений с препятствиями. Ошибка положения контактных точек в физическом мире относительно виртуальной модели в среднем не превышала 1 см.
Контактными точками называют места на теле робота, которые в данный момент соприкасаются с окружающими объектами. Например, если робот толкает дверь локтем, то контактная точка находится именно в этом суставе. А отклонение не более 1 см означает, что робот может достаточно точно «попасть» локтем в кнопку лифта или автоматического открытия двери.
В ближайшее время китайские разработчики планируют адаптировать свою систему для использования в серийных промышленных и сервисных роботах. В планах также создание более сложных сценариев, совместного переноса негабаритных грузов несколькими гуманоидными роботами одновременно.