Спаржа — одна из самых трудоемких культур на рынке. Сбор урожая требует предельной точности: местность неровная, а стебли тонкие и разной длины. Эти сложности препятствуют автоматизации, так как существующие роботы для уборки урожая слишком медленные и неэффективные. Исследователи из Технического университета Мюнхена (TUM) разработали прототип робота, который обнаруживает и собирает спелую зеленую спаржу, двигаясь с коммерчески привлекательной скоростью. Планируются дальнейшие испытания для повышения эффективности уборки урожая с помощью этого робота.
Данная работа была представлена на 8-й конференции IFAC по сенсорным, управляющим и автоматизированным технологиям для сельского хозяйства AGRICONTROL 2025 в городе Дэвис, штат Калифорния, 27–29 августа 2025 года. Статья опубликована в сборнике трудов конференции IFAC-PapersOnLine.
Как робот определяет и находит спаржу
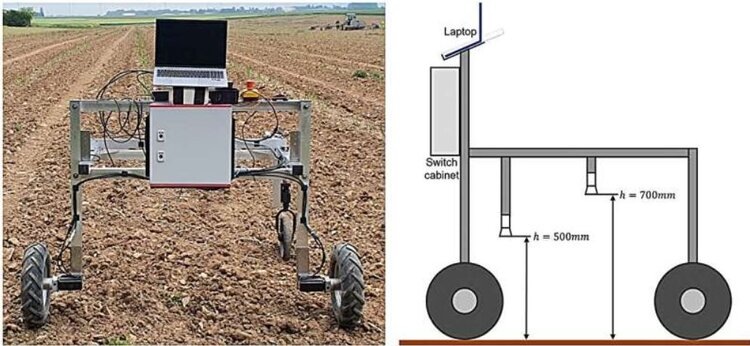
Для правильной идентификации стеблей спаржи необходимо обработать несколько снимков с установленных камер. Эти снимки передаются роботизированному приводу, который может собирать спаржу. Робот должен учитывать, что он движется и что относительное положение спаржи по отношению к роботу изменяется в промежутке времени между локализацией и сбором урожая.
Представленный прототип успешно выполняет эти первые этапы процесса; благодаря установленным камерам и алгоритмам робот может идентифицировать и определять местоположение побегов спаржи, при этом быстро перемещаясь. «Мы видим большие возможности для робототехники при сборе спаржи во всем мире», — говорит Тимо Оксанен, профессор агромехатроники в Техническом университете Мюнхена.
Перед разработкой этого прототипа исследователи рассчитали, что для коммерческой привлекательности робот должен двигаться со скоростью не менее 0,33 метра в секунду. Представленный прототип может двигаться со скоростью до 0,8 метра в секунду на неровных участках и до 1 метра в секунду на ровной местности. Благодаря такой скорости и одновременному обнаружению и локализации стеблей спаржи, прототип превосходит существующие рыночные стандарты.
На следующем этапе алгоритмы обнаружения будут усовершенствованы в ходе дальнейших испытаний. «После дальнейшей оптимизации обнаружения мы займемся алгоритмом сбора урожая и функциями робота», — говорит Андреас Нойбауэр, разработчик робота.
Источник: Technical University Munich.
Интересна тема? Подпишитесь на наши новости в ДЗЕН | Канал в Telegram | Группа Вконтакте | Канал в MAX | Дзен.новости.