Сейчас марсоходы передвигаются медленно: задержка связи с Землёй достигает 22 минут, поэтому каждый шаг учёные планируют заранее. За день аппарат проходит несколько сотен метров, исследуя лишь небольшую зону вокруг места посадки. Группа под руководством доктора Габриэлы Лигезы (Gabriela Ligeza) из Европейского космического агентства предложила другой вариант — полуавтономного робота, который сам выбирает цели и проводит измерения.

Фото - д-р Томазо Бонтоньяли
Для экспериментов взяли четвероногого робота ANYmal, разработанного в лаборатории роботизированных систем ETH Zurich. На него установили роботизированную руку с двумя приборами: микроскопическим сканером MICRO и портативным рамановским спектрометром. Испытания проходили в лаборатории Marslabor Базельского университета, где воссоздали условия планетарной поверхности с аналогами горных пород и реголита.
Робот автономно подходил к выбранным целям, разворачивал руку с приборами и фиксировал данные — изображения и спектральные характеристики пород. Система успешно распознала несколько типов пород, имеющих научную ценность: гипс, карбонаты, базальты, а также лунные аналоги — дунит (богат оливином) и анортозит (содержит анортит).
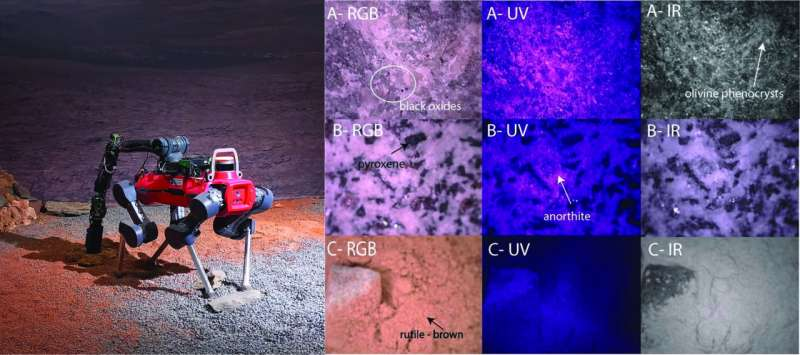
Фото - д-р Габриэла Лигеза.
Сравнили два подхода. При традиционном управлении человеком на анализ одной цели ушла 41 минута. Полуавтономная стратегия, когда робот последовательно обследовал несколько точек, заняла от 12 до 23 минут. При этом точность не пострадала: в одном из тестов все цели идентифицировали правильно.
Вместо того чтобы ждать команд с Земли после каждого действия, такие роботы смогут быстро сканировать местность, собирать данные и отмечать перспективные участки для детального изучения. Ученые получат возможность анализировать поступающую информацию и выбирать наиболее интересные образцы, не тратя время на медленное перемещение по одному камню за раз.
Читайте далее на сайте
ESA: солнечная буря уровня шторма Каррингтона 1859 года может вывести из строя все спутники Земли
ESA показало полет над марсианской долиной Шалбатан в новом видео Mars Express
НАСА потеряло связь с зондом MAVEN на орбите Марса и может потерять аппарат Mars Odyssey
Лазер обеспечил передачу данных с самолета на геостационарный спутник на скорости 2,6 Гбит/с