
Сотрудники Института робототехники и искусственного интеллекта (RAI) представили прототип робота Roadrunner, который заметно отличается от привычных гуманоидных моделей. Разработка сочетает ноги и колёса, делая ставку не на «человеческую» форму, а на эффективность передвижения. За проектом стоит Марк Рэйберт, основатель и бывший глава Boston Dynamics, так что ожидания относительно новинки изначально были высокими.
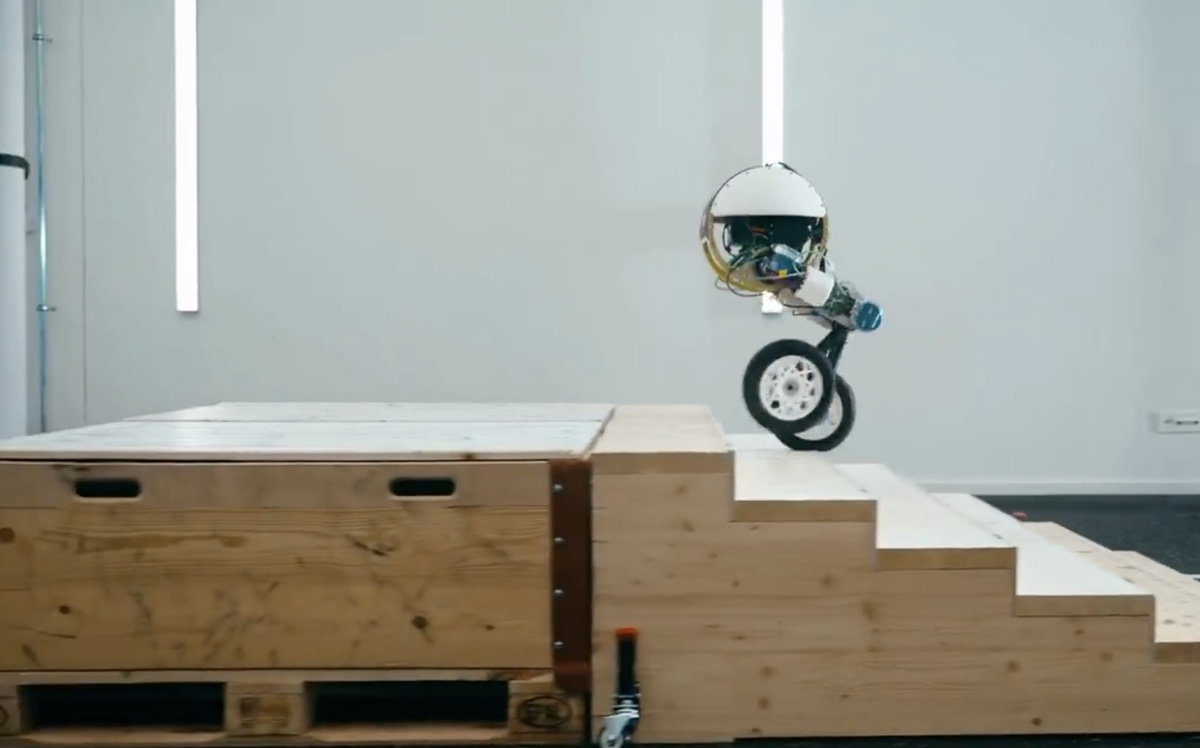
Roadrunner весит около 15 кг и использует необычную конструкцию: симметричные «ноги» с колёсами вместо ступней. На ровной поверхности он передвигается как классический колёсный робот, но при необходимости легко справляется с препятствиями — например, поднимается по ступеням или спускается по ним, контролируя баланс.
Ключевая особенность — универсальная система управления. Один алгоритм отвечает сразу за разные режимы движения: от езды по прямой до балансировки на одном колесе. Причём часть навыков робот выполняет без дополнительного обучения — они изначально заложены в модель и работают «из коробки».
Создатели рассматривают Roadrunner как платформу для дальнейших экспериментов с мобильностью. Такой подход может оказаться практичнее гуманоидных решений: в задачах вроде инспекций или складской логистики важнее скорость, устойчивость и простота конструкции, а не сходство с человеком.