В прошлой статье мы разобрались, что такое BLDC-двигатель и как работает шестиступенчатая коммутация. Теперь пришло время перейти к практике! Писать буду коротко, так как если всё подробно описывать, текст получается очень объёмный.
Сделал в KiCad принципиальную схему одной фазы, для других фаз всё собирается аналогично. Ссылка на проект внизу статьи.
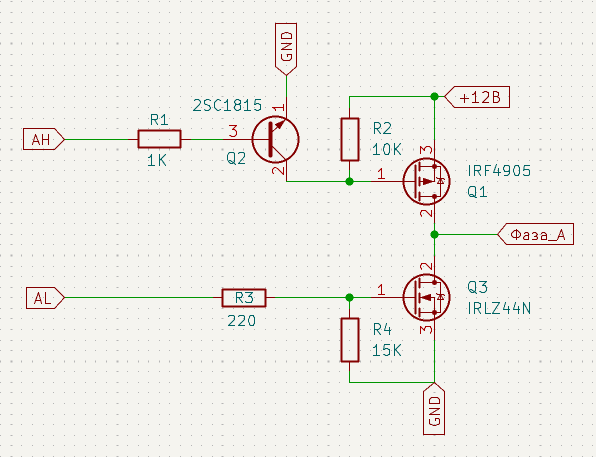
Компоненты:
- Q1 (IRF4905) — P-канальный MOSFET (верхний ключ)
- Q3 (IRLZ44N) — N-канальный MOSFET (нижний ключ)
- Q2 (2SC1815) — NPN транзистор (управление верхним ключом)
- R1 (1K), R3 (220Ω) — ограничительные резисторы
- R2 (10K), R4 (15K) — подтягивающие резисторы
Управление:
- AH — верхний ключ (к выводу Arduino)
- AL — нижний ключ (к выводу Arduino)
- Фаза_A — подключение к двигателю
Как работает:
- AH = HIGH > Q2 открыт > затвор Q1 на GND > Q1 открыт (+12В на фазе)
- AH = LOW > Q2 закрыт > затвор Q1 подтянут к +12В > Q1 закрыт
- AL = HIGH > затвор Q3 на +5В > Q3 открыт (GND на фазе)
- AL = LOW > затвор Q3 подтянут к GND > Q3 закрыт
Важно:
- Для защиты от обратных выбросов нужно добавить диоды Шоттки параллельно MOSFET
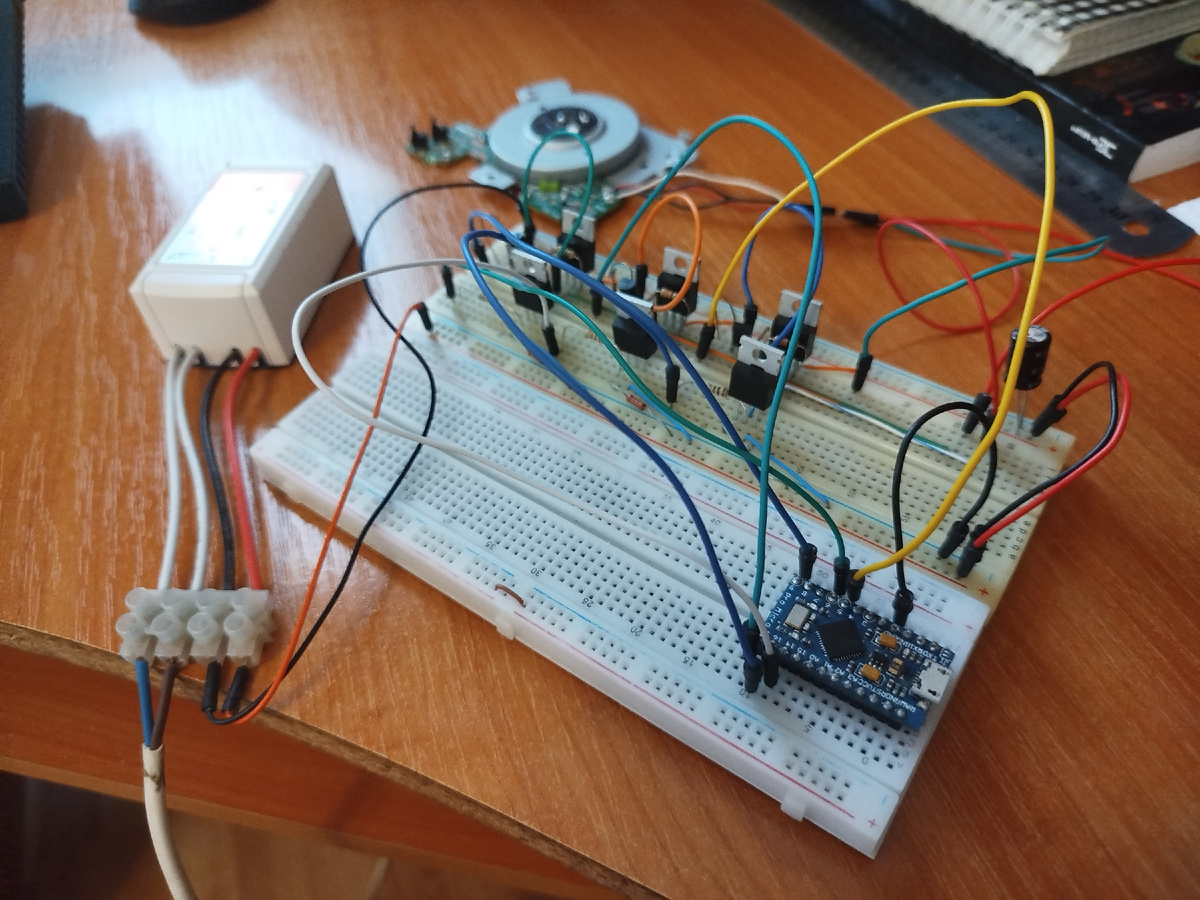
Собрал на макетной плате, для тестов, но это, конечно, очень не удобно. Контакты отваливаются и двигатель останавливается, а это плохо - можно сжечь ключи. У меня двигатель с такой схемой разгоняется до 4000 оборотов в минуту, если я правильно всё посчитал. Работает примерно 1 минуту и нижние ключи начинают греться, после разгона можно снизить напряжение. У меня при разгоне pwm 240, почти максимум, а после разгона можно снизить.
Прошивка
Алгоритм работы:
- Инициализация — настройка выводов и таймеров (PWM 15.6 кГц)
- Разгон — 3 этапа (плавное увеличение скорости)
- Работа — вращение на фиксированной скорости (4000 об/мин)
Этапы разгона:
- 20000 → 4000 мкс | 200 → 1000 об/мин | ~3.8 сек
- 4000 → 2000 мкс | 1000 → 2000 об/мин | ~1.2 сек
- 2000 → 1000 мкс | 2000 → 4000 об/мин | ~1.5 сек
Особенности:
- Шестиступенчатая коммутация (6 шагов на электрический оборот)
- DeadTime 5 мкс (защита от сквозных токов)
- PWM для верхних ключей (плавное регулирование скорости не реализовал)
- Цифровое управление для нижних ключей
- Частота PWM: 15.6 кГц (Timer1 и Timer3)
Код прошивки: https://gitflic.ru/project/ruslanr/bldc-servo-floppy
Итог первой части
Что получилось:
- Разобрал 3 флоппи-дисковода
- Собрал трёхфазный полумост
- Запустил двигатель без обратной связи
- Разогнал до 4000 об/мин
Проблемы:
- ⚠️ Нижние ключи греются через 1 минуту работы
- ⚠️ Макетная плата ненадёжна (контакты отваливаются)
Что будет дальше:
- ⏳ Добавить энкодер (1000 PPR)
- ⏳ Реализовать обратную связь по положению
- ⏳ Настроить PID-регулятор
- ⏳ Сделать редуктор 1:10
- ⏳ Развести нормальную плату (не макетку)
Следите за серией! Следующая статья: «Часть 2: Подключение энкодера и обратная связь»