🤖 Инженеры научили андроида на ходу менять жесткость стоп.
Большинство существующих гуманоидных роботов ходят на жестких стопах. Так ими проще управлять, но это приводит к тому, что они часто падают и теряют устойчивость.
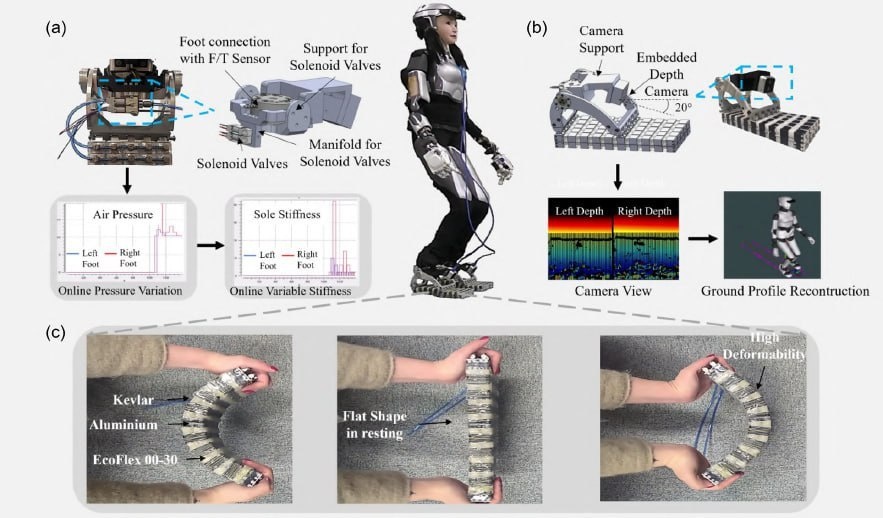
Ученые из Франции и Японии разработали для андроидов мягкие пневматические стопы, которые могут в реальном времени менять жесткость в зависимости от типа поверхности. Примерно как мышцы человеческих стоп регулируют тонус на разных покрытиях.
Стопы изготовили из силикона, а для распознавания рельефа на передней части каждой стопы установили камеры глубины. Стопы способны переключаться от мягкого состояния к жесткому менее чем за 100 миллисекунд.
Робота уже проверили в лабораторных условиях. Он успешно прошел дистанцию в два метра по гладкому полу, ковру и по ковру с разбросанными кабелями.
Крамола | Подпишись на нас в MAX