Давно хотел разобраться, как устроены ВДПТ (вентильный двигатель постоянного тока), или BLDC-двигатели. И вот это время пришло. От старых ПК у меня осталось 5 старых 3,5-дюймовых флоппи-дисководов, и я решил использовать BLDC-двигатели из этих флоппи-дисков. Что из этого получится и получится ли вообще — пока непонятно, но попытка не пытка. Как говорится, дорогу осилит идущий. Сложно? Да. Но безумно интересно.
Как итог, если всё получится — сделать хоббийный ЧПУ станок.
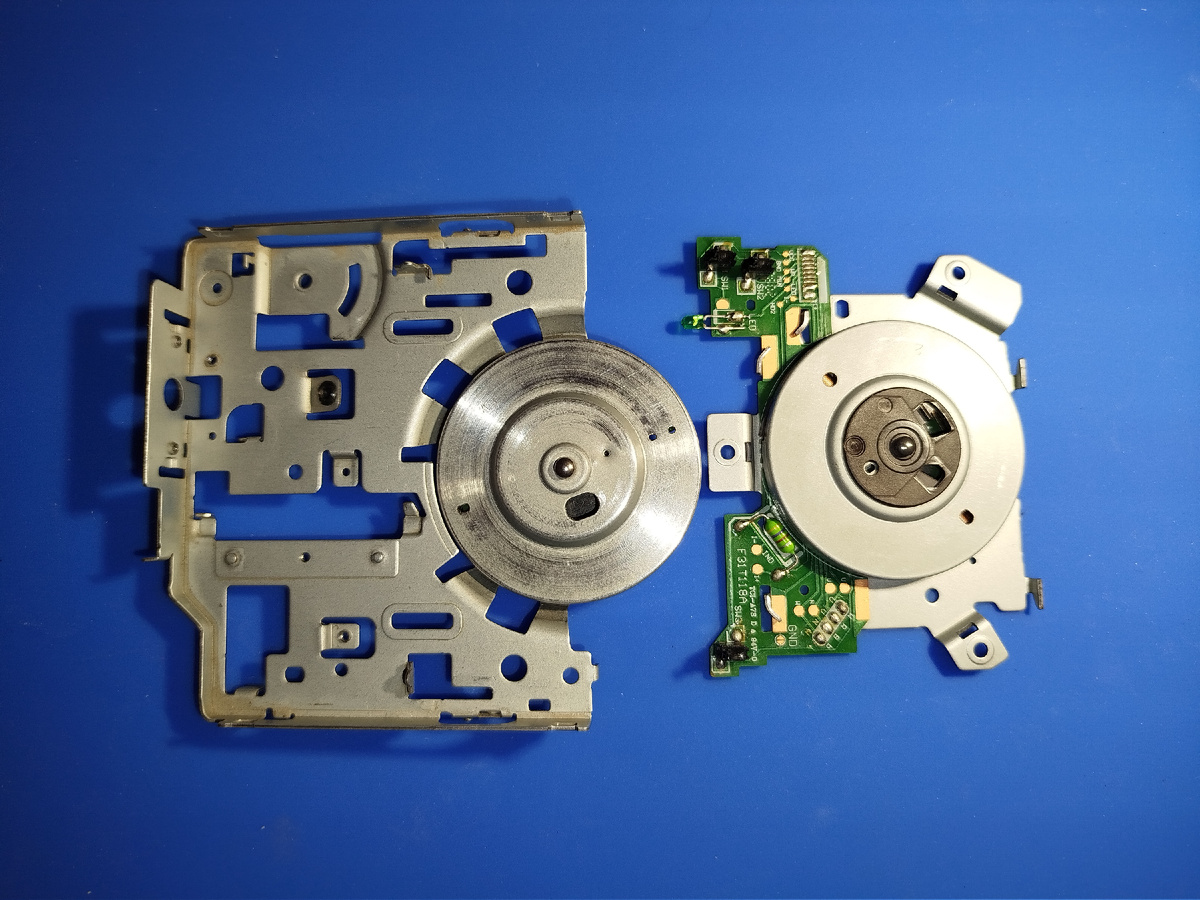
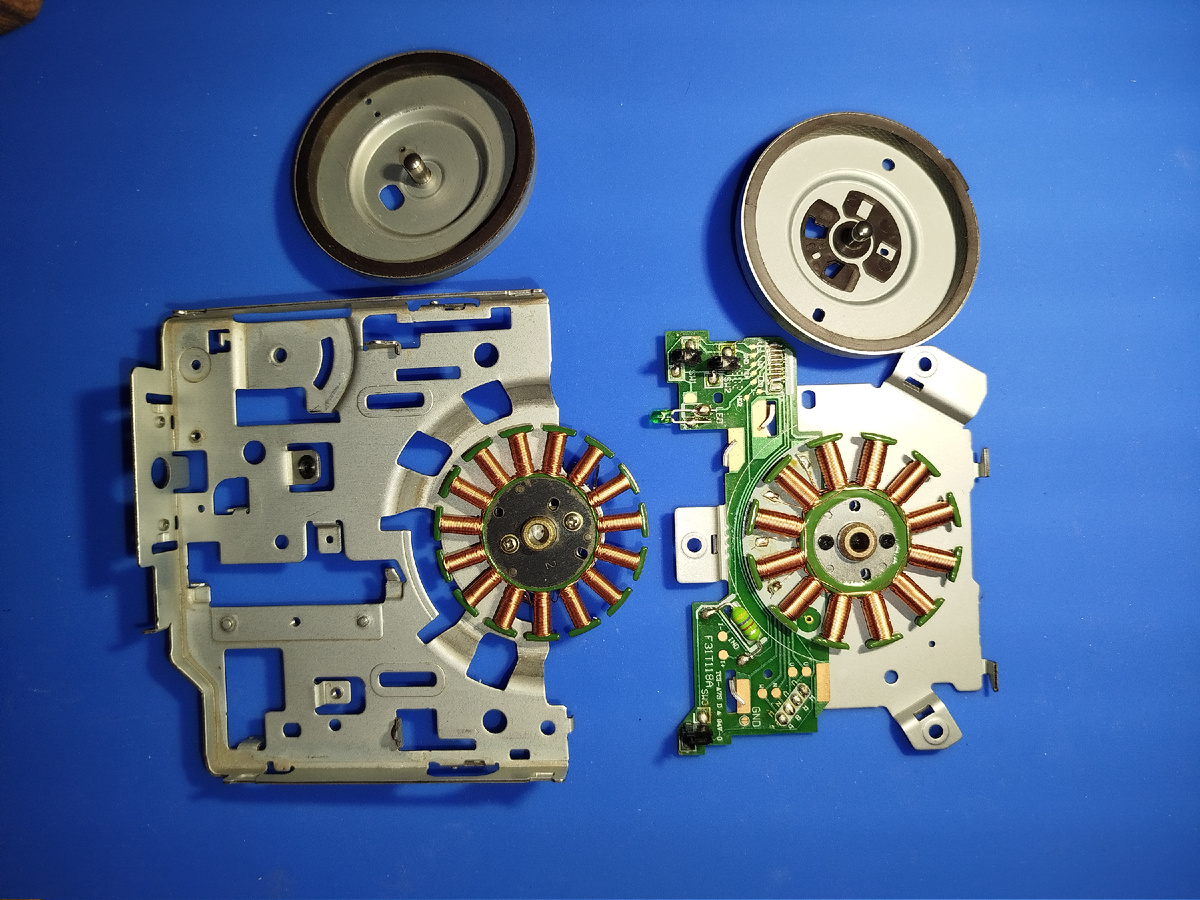
На фото — двигатели из флоппи-дисков. Один двигатель имеет 15 обмоток и 10 пар полюсов на роторе. Второй двигатель имеет 12 обмоток и 7 пар полюсов (но это не точно, у второго не считал, сколько полюсов). Из двигателя выходит 4 провода: три провода — это фазы A, B и C, и четвёртый — это общая точка (нейтраль), где объединены начала трёх обмоток.
На фото — микроконтроллеры, которые у меня есть.
В общем, идея — сделать сервопривод и разбираться по ходу дела, что и как. Для управления этим двигателем мне понадобится микроконтроллер. У меня есть два микроконтроллера Arduino Pro Mini на МК ATmega168 и один микроконтроллер Arduino Pro Micro на МК ATmega32U4. Пока Pro Micro буду использовать как ISP-программатор для Pro Mini. Для начала нужно сделать сервопривод для одной из осей станка. И мне понадобится трёхфазный полумост для управления обмотками двигателя по шестиступенчатой схеме. Микроконтроллер и полумост будут драйвером для нашего двигателя. Также нужно будет сделать прошивку на Си для управления двигателем. Так как двигатель маломощный, всего 12 В и 1–1,5 А, то скорей всего придётся делать для него редуктор, думаю, редуктора 1 к 10 хватит.
Почему решил оформить это в виде статей на своём канале? Для того чтобы поделиться результатами с другими людьми, кому это интересно, и, может быть, по ходу дела найти единомышленников и делиться идеями и результатами.
Краткая теория: что такое BLDC-двигатель
BLDC (BrushLess DC), или по-русски ВДПТ (вентильный двигатель постоянного тока), — это бесщёточный двигатель, у которого нет коллектора и щёток. Коммутация обмоток происходит электронным способом.
Конструкция:
- Статор — неподвижная часть с обмотками (обычно 3 фазы: A, B, C)
- Ротор — вращающаяся часть с постоянными магнитами
Принцип работы:
- Подаём ток на две из трёх фаз
- В статоре создаётся магнитное поле
- Ротор с магнитами поворачивается, чтобы совпасть с полем статора
- Переключаем фазы — ротор поворачивается дальше
- Повторяем — двигатель вращается
Шестиступенчатая коммутация
Для управления трёхфазным BLDC-двигателем используется шестиступенчатая коммутация (6 шагов на один электрический оборот).
6 шагов коммутации:
Где:
- AH, BH, CH — верхние ключи (подключают фазу к +12В)
- AL, BL, CL — нижние ключи (подключают фазу к GND)
Как это работает:
- Включаем AH + BL → ток течёт через фазу A в фазу B → ротор поворачивается
- Включаем AH + CL → ток течёт через фазу A в фазу C → ротор делает ещё шаг
- И так далее по кругу...
За один электрический оборот двигатель делает 6 шагов. Если у двигателя 10 пар полюсов, то для одного механического оборота нужно 10 электрических оборотов = 60 шагов. 60 шагов у первого двигателя с 15 обмотками и 10 парами полюсов на роторе.
Что такое драйвер и MCU
Драйвер — это схема, которая управляет ключами двигателя. Обычно это:
- 3 верхних ключа (MOSFET) — подключают фазы к питанию
- 3 нижних ключа (MOSFET) — подключают фазы к земле
- Драйверы затворов — усиливают сигнал от МК для управления MOSFET
MCU (Microcontroller Unit) — микроконтроллер. В моём случае это ATmega168 (Arduino Pro Mini). Он:
- Генерирует PWM-сигналы для ключей
- Считывает энкодер (обратная связь)
- Реализует PID-регулятор
- Управляет всем процессом
Схема управления (будет в следующей статье)
В следующей статье я добавлю:
- Полную схему драйвера
- Ссылку на прошивку на GitFlic
- Видео запуска двигателя
Что получилось:
- ✅ Изучил теорию шестиступенчатой коммутации
- ✅ Запустил двигатель без обратной связи
- ✅ Разогнал до 4000 об/мин
Что будет дальше:
- Добавлю энкодер (1000 PPR)
- Попробую реализовать точное позиционирование
- Реализую и настрою PID-регулятор
- Добавлю редуктор 1:10
Следите за серией и подписывайтесь! Следующая статья: «Часть 1: Схема драйвера и первый запуск»