Американская компания, специализирующаяся на компьютерном зрении, представила свою роль в повышении безопасности и надежности человекоподобных роботов в реальных условиях на конференции NVIDIA GTC, проходящей в Калифорнии.
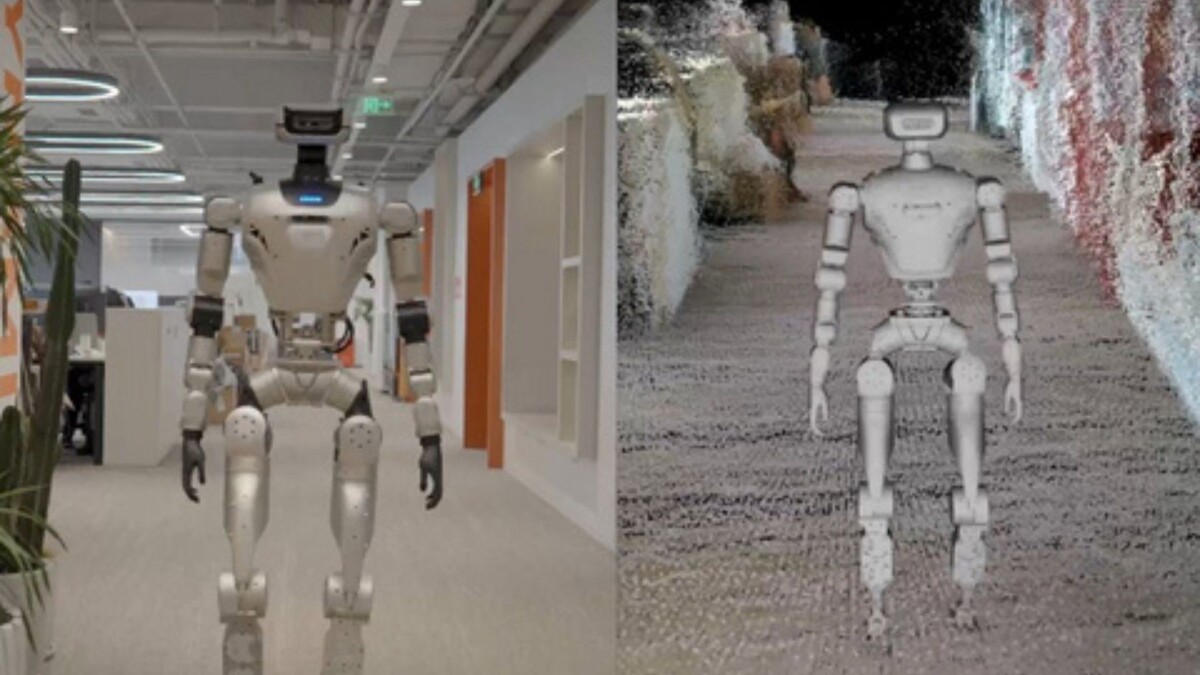
Компания RealSense представила первую в своем роде демонстрацию автономной навигации совместно с LimX Dynamics, подчеркнув, как ее передовые технологии 3D-зрения и визуальной SLAM (одновременная локализация и картографирование) позволяют роботам перемещаться, составлять карты и работать с большей безопасностью и точностью.
В ноябре 2025 года китайские исследователи разработали новую навигационную систему для роботов, вдохновленную тем, как крысы, муравьи и птицы ориентируются в пространстве.
По мере того, как человекоподобные роботы переходят от новинки к повседневному использованию, восприятие становится центральным элементом не только производительности, но и безопасности. Усовершенствованные камеры, сенсорные системы и программное обеспечение для рассуждений теперь действуют как зрительная кора робота, позволяя ему понимать и работать в сложных условиях, имитирующих человеческую среду.
Traditional approaches, such as encoder-based odometry and 2D LiDAR, commonly used in wheeled robots like robotic vacuums, fall short in providing the depth and spatial understanding required for legged mobility. As a result, many humanoid and quadruped robots have until now depended on teleoperation, human supervision, or highly controlled environments. Bridging this perception gap is essential for enabling truly autonomous, safe, and reliable operation in real-world settings.
“If robots are going to work safely beside humans, perception carries responsibility beyond raw sensors. It must function as the robot’s visual cortex, enabling accurate localization, collision avoidance, terrain understanding, and stable, predictable motion in unstructured environments,” said Nadav Orbach, CEO of RealSense, in a statement.
Традиционные подходы, такие как одометрия на основе энкодеров и 2D LiDAR, широко используемые в колесных роботах, например, роботизированных пылесосах, не обеспечивают необходимого для передвижения с помощью ног понимания глубины и пространства. В результате многие человекоподобные и четвероногие роботы до сих пор зависели от дистанционного управления, контроля со стороны человека или строго контролируемой среды. Преодоление этого разрыва в восприятии имеет важное значение для обеспечения действительно автономной, безопасной и надежной работы в реальных условиях.
«Если роботы собираются безопасно работать рядом с людьми, восприятие несет ответственность не только за работу датчиков. Оно должно функционировать как зрительная кора робота, обеспечивая точную локализацию, предотвращение столкновений, понимание рельефа местности и стабильное, предсказуемое движение в неструктурированной среде», — заявил Надав Орбах, генеральный директор RealSense, в своем заявлении.
К моменту своего появления на NVIDIA GTC человекоподобный робот уже освоил сложные движения с предсказуемой и надежной безопасностью, что снизило риски и ускорило разработку.
По словам компании, демонстрация LimX Dynamics подчеркивает, как технология RealSense становится ключевой частью современной робототехники. Разработанные более десяти лет назад, камеры с датчиками глубины и программные инструменты помогают инженерам быстрее создавать и тестировать роботов. Видео.