Оптимизация алгоритма QPALM-OCP для решения задач линейно-квадратичного оптимального управления с применением параллелизации и векторизации. Новая работа демонстрирует значительное повышение производительности алгоритма QPALM-OCP благодаря использованию векторизации и параллельных вычислений на базе OpenMP.
Эффективное решение задач оптимального управления часто требует значительных вычислительных ресурсов, особенно при увеличении размерности. В данной работе, посвященной исследованию «Exploiting Parallelism in a QPALM-based Solver for Optimal Control», предлагается оптимизация алгоритма QPALM-OCP, основанная на распараллеливании и векторизации вычислений.
Разработанная реализация на C++ с использованием OpenMP демонстрирует существенное ускорение решения задач линейно-квадратичного оптимального управления по сравнению с оригинальным методом QPALM. Каковы перспективы дальнейшей оптимизации алгоритма QPALM-OCP и его применения к более сложным задачам оптимального управления?
Преодолевая границы оптимального управления: скорость и эффективность
Решение задач оптимального линейно-квадратичного управления играет ключевую роль в современных робототехнических системах и системах управления, однако требует значительных вычислительных ресурсов. Традиционные методы часто оказываются неэффективными при работе с задачами большого масштаба, что ограничивает их применение в сложных, реалистичных сценариях. Повышение скорости и эффективности решения этих задач требует разработки инновационных алгоритмов и оптимизированных программных реализаций.
Особенно важным является учет разреженности, присущей многим практическим задачам управления, — когда большинство параметров системы незначительно влияют на конечный результат, и использование этой особенности позволяет существенно снизить вычислительную нагрузку и добиться более быстрого и точного управления.
Современный подход к оптимальному управлению: QPALM-OCP
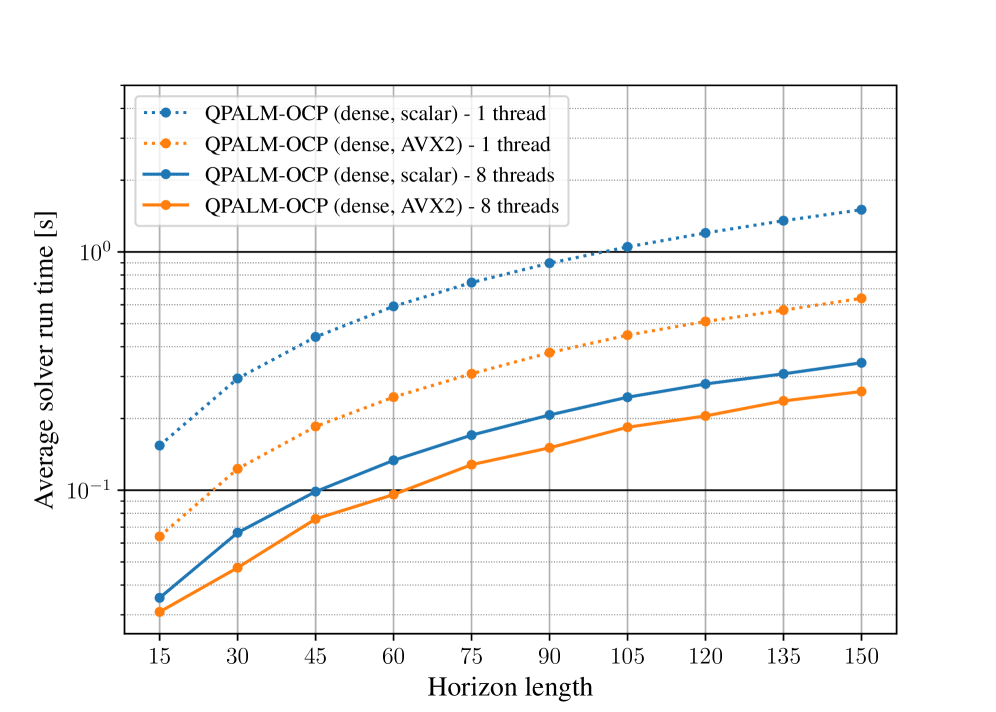
Алгоритм QPALM-OCP представляет собой решение для задач оптимального управления, основанное на методе дополненной лагранжевой функции, позволяющем эффективно решать задачи оптимизации с ограничениями. Инновационным аспектом является поэтапная параллелизация вычислений, распределяющая нагрузку между несколькими процессорами с использованием OpenMP, что увеличивает скорость работы.
Для решения возникающих подзадач используется специализированная реализация метода Ньютона, адаптированная для работы с обобщенным гессианом. Дополнительное повышение производительности достигается за счет использования компактного формата хранения данных, который повышает локальность данных и позволяет эффективно использовать SIMD-инструкции, то есть выполнять одну и ту же операцию над несколькими данными одновременно, ускоряя обработку информации.
Оценка Производительности и Сравнение с Существующими Методами
Для оценки эффективности алгоритма QPALM-OCP проводились испытания на стандартных бенчмарках, включая Spring-Mass, QUADCMPC и LIPMWALK. Результаты демонстрируют превосходство QPALM-OCP над существующими подходами, особенно при решении масштабных задач. В частности, на бенчмарке Spring-Mass наблюдалось ускорение до 29 раз по сравнению с QPALM, использующим плотные блоки данных.
Достижение высокой производительности стало возможным благодаря реализации алгоритма с использованием библиотек BLIS Framework и Intel MKL, а также использованию разреженности данных и возможностей параллельных вычислений. Применение AVX2-векторизации, как утверждается, позволило получить дополнительное ускорение до 2,3 раза без потери точности. На бенчмарке LIPMWALK QPALM-OCP показал время решения 0,43 миллисекунды, что незначительно быстрее, чем 0,46 миллисекунды у стандартного QPALM, демонстрируя оптимизацию даже для задач с небольшим объемом данных.
Открытие новых горизонтов: Возможности и перспективы QPALM-OCP
Алгоритм QPALM-OCP демонстрирует высокую скорость и масштабируемость, позволяя осуществлять управление сложными роботизированными системами в режиме реального времени и оптимизировать масштабные процессы. Устраняя вычислительные ограничения, данная разработка открывает новые пути для исследований в областях автономной навигации и динамического распределения ресурсов. Дальнейшие работы могут быть направлены на расширение возможностей QPALM-OCP для работы с нелинейными динамическими системами и внедрение методов машинного обучения для адаптивного управления. Модульная конструкция алгоритма обеспечивает интеграцию с существующими системами управления и возможность дальнейшей оптимизации за счет аппаратного ускорения, что делает его перспективным инструментом для широкого спектра приложений, требующих быстрого и эффективного управления сложными процессами.
Исследование, представленное в данной работе, демонстрирует важность глубокого понимания структуры решаемых задач для достижения максимальной производительности. Оптимизации, такие как векторизация и параллелизация с использованием OpenMP, направлены на согласование структуры алгоритма с архитектурой вычислительной системы. Как однажды сказал Пьер Кюри: «Я не верю в счастливые случаи; я верю в подготовленные умы». Этот принцип находит отражение в подходе, описанном в статье, где тщательный анализ и систематическая оптимизация позволили повысить эффективность решения задач линейно-квадратичного оптимального управления.
Куда же дальше?
Представленные оптимизации алгоритма QPALM-OCP, в особенности векторизация и параллелизация посредством OpenMP, показывают, что прирост производительности не является абсолютной величиной и зависит от того, насколько удается согласовать структуру алгоритма с архитектурой вычислительной системы. Ошибка в модели — не провал, а сигнал о необходимости переосмысления подхода к представлению и обработке данных. Вопрос не в том, чтобы «ускорить» решение, а в том, чтобы понять, как оптимально организовать процесс вычислений.
Однако следует признать, что параллелизация, хотя и эффективна, не является панацеей. Увеличение числа ядер процессора не всегда приводит к пропорциональному уменьшению времени вычислений, особенно при решении крупномасштабных задач. Ограничения, связанные с передачей данных и синхронизацией потоков, неизбежно возникают. Таким образом, дальнейшие исследования могут быть направлены на разработку алгоритмов, изначально ориентированных на параллельное выполнение, минимизирующих необходимость в межпотоковом взаимодействии.
Понимание структуры оптимального управления как системы, требующей адаптации к меняющимся условиям, открывает новые горизонты. В будущем, вероятно, стоит обратить внимание на интеграцию методов машинного обучения для автоматической оптимизации параметров алгоритма QPALM-OCP в зависимости от характеристик решаемой задачи. Это позволит перейти от ручной настройки к самообучающейся системе, способной адаптироваться к различным сценариям и извлекать максимум пользы из доступных вычислительных ресурсов.