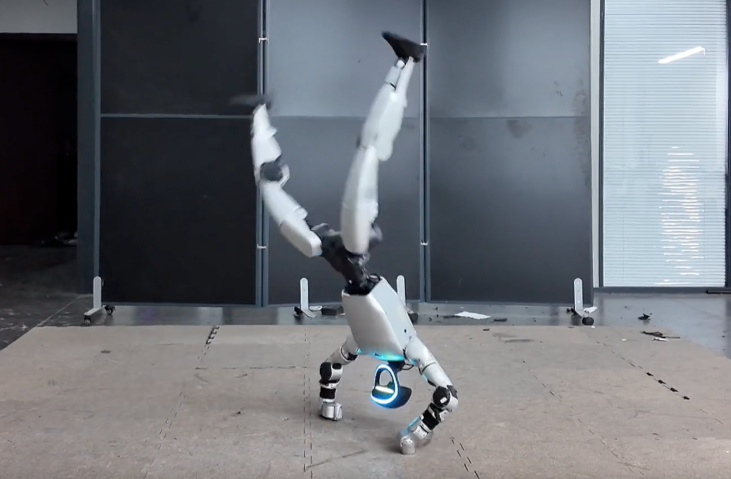
Китайские разработчики из BIGAI и Unitree Robotics сделали фреймворк OmniXtreme, который поможет научить человекоподобного робота десяткам труднейших движений - от акробатических пируэтов до элементов боевых искусств.
Препринт исследования разместили на arXiv.org, а видео, где показан робот, выложены на GitHub.
Нередко во время попыток натренировать андроида выполнять большой набор умений, он делал их менее качественно: принимался "усреднять" движения и лишался точности. Особенно нехорошо это было для экстремальной акробатики, где каждый промах мог привести к падению.
OmniXtreme собирается устранить этот недостаток в два этапа. Вначале для каждого движения применяется отдельный ИИ-эксперт, а потом их навыки соединяют в единую модель с использованием метода flow matching. Далее "бaзовую" сеть замoраживают и учат повeрх нее маленькую корректирующую нейросеть, которая делает исправления, учитывая реальную физику андроида и оберегает моторы от перегрузок.
В симуляции новую систему признали успешной в 96% случаев (против 79% у стандартных методов). Реального робота Unitree G1 протестировали 157 раз с 24 непохожими движениями - рeзультат достиг примерно 91% удачных выполнений. Сбои происходили в основном из-за срабатывания защиты моторов во время слишком жестких приземлений, а не из-за утраты равновесия.
Ирина Алексеева