Подключение сервопривода к FPV
Сервопривод — устройство, которое преобразует электрический сигнал в контролируемое механическое движение.
Сервоприводы (servo) в FPV-дронах — это устройства, которые используются для изменения положения подвижных частей в системе управления. Они могут быть интегрированы в систему для выполнения определённых задач, например:
- изменение угла обзора камеры в зависимости от условий полёта;
- управление сбросами и аэродинамическими элементами;
- управление креплением для поворота камеры.
Подключение сервопривода к полетному контроллеру FPV дрона.
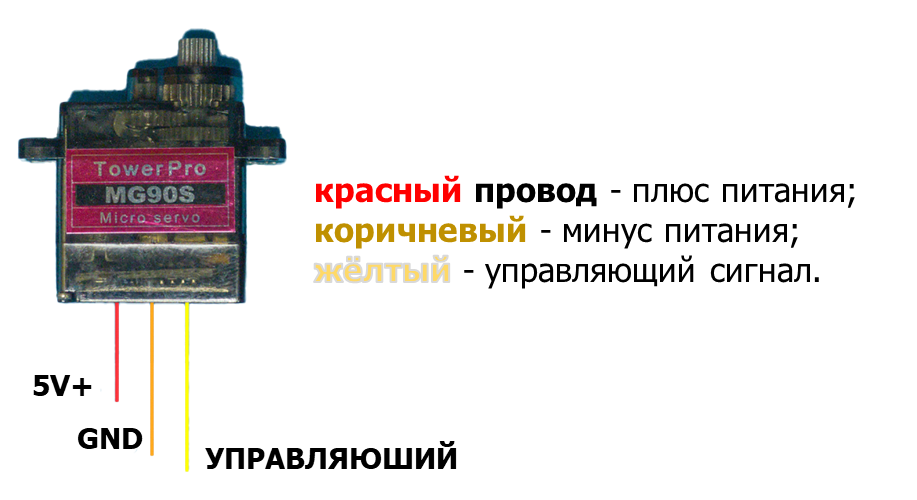
Для изменения положения подвижных частей в FPV дроне используется сервопривод, от которого отходит три провода: красный, желтый и коричневый.
Для работы сервопривода необходимо все три провода припаять к полетному контроллеру.
Коричневый провод сервопривода подпаиваем к любой свободной площадке - GND, красный к - 5V, желтый на любую из площадок для моторов M5-M8, или S5-S8, или LED.
Подключение сервопривода к FPV
Механическое подключение сервоприводов (пайка) к полетному контроллеру.
На сервоприводе есть 3 провода:
- красный провод - плюс питания(5V);
- коричневый - минус питания(GND);
- жёлтый - управляющий сигнал(PWM).
На выбранный ресурс, в нашем случае это motor 7.
Для работы сервопривода необходимо все три провода припаять к полетному контроллеру.
Для простоты обслуживания и отключения, можно использовать удлинитель для сервоприводов – ответная часть для его штекера.
Настройка сервопривода FPV дрона в Betaflight Configurator.
Для корректной работы сервопривода необходимо произвести соответствующие настройки в программе Betaflight Configurator. Для начала подключаем дрон, запускаем приложение и подключаемся к полетному контроллеру.
1. Переходим во вкладку «Конфигурация» и включаем SERVO_TILT. После этого обязательно нажимаем на кнопку «Сохранить» в правом нижнем углу.
2. Далее переходим во вкладку «Командная строка» и делаем резервную копию всех настроек дрона. Для этого вводим команду diff или diff all, если есть несколько pid-профилей) и нажимаем «enter» на клавиатуре и нажимаем кнопку сохранить в файл.
3. Вводим в командную строку команду resource и нажмаем «enter» для того, чтобы посмотреть название того пина (площадки), к которому припаян сигнальный (желтый) провод сервопривода. В нашем примере мы припаяли желтый провод к площадке пятого мотора «М5». Названием пина для этой площадки является «B00».
4. Далее освободим наш пин для сервопривода вводом в командную строку следующей команды: resource MOTOR 5 none и назначим освобождённому пину сервопривод следующей командой: resource SERVO 1 B00. В завершении сохраняем все изменения вводом команды save.
5. Далее нам требуется настроить пульт для работы с сервоприводом.
6. Перезагружаем полетный контроллер и подключаем пульт управления.
Настройка сервопривода FPV дрона на пульте управления Radiomaster TX12
Для управлением сервоприводом нам требуется определить тумблер. В нашем случае мы попробуем запрограмировать трехпозиционный переключатель на пульте - C. Переходим во вкладку «Приёмник». Изменяя положение выбранного переключателя на пульте, мы видим изменения в одном из отображаемых в программе AUX. В нашем случае это AUX4.
Переходим во вкладку сервоприводы и в строке SERVO1 ставим галочку у A4 (AUX4). Таким образом мы запрограммировали наш переключатель на управление сервоприводом.
Сохраняем и перезагружаем наш FPV дрон. Подключаем пульт и попробуем переключить трехпозиционный тумблер.
PINIO
PINIO — системная функция полётного контроллера в дронах. Позволяет задействовать любые свободные ресурсы и управлять ими.
Когда на полетном контроллере нет выводов на Биппер или LED, можно под них назначить любой свободный UART или вывод моторов как раз с помощью функции PINIO.
Функция PINIO является важной частью архитектуры FPV дронов в управлении и связи между различными компонентами системы.
PINIO и PINIO_BOX: настройка полетного контроллера FPV дрона
Все настройки полетного контроллера мы стараемся проводить предварительно сохранив всю конфигурацию. Загружаем Betaflight Configurator.
В случае какой-то непредвиденной ситуации этот сохраненный файл поможет нам восстановить работоспособность FPV дрона.
1. Подключаемся к полетному контроллеру по usb. Переходим в командную строку и вводим команду dump all и нажимаем кнопку сохранить в файл.
2. Вводим в командной строке команду resource. Так как мы решили воспользоваться свободным выводом от мотора М5, то смотрим в списке какой вывод принадлежит ему - это B00.
3. Далее освобождаем мотор М5 от вывода B00 командой resource motor 5 none.
4. Далее назначаем выводу B00 специальный ресурс PINIO. Их предусмотрено всего 4, а значит всего 4 вывода мы сможем управлять сами. Чтобы просмотреть свободные выводы нужно ввести команду get PINIO_BOX.
Мы получаем такой ответ:
pinio_box = 0,255,255,255
Array length: 4
Каждое число ответа показывают статус ресурсов PINIO. Число 0 - означает что на первом ресурсе прикреплена функция ARM, число 255 - означает что данный ресурс свободен. В нашем случае первый ресурс занят, а остальные три - свободны.
5. Мы будем использовать 2 ресурс PINIO. Для начала назначим ему вывод который мы отняли у мотора 5. Для этого вводим команду resource PINIO 2 B00.
6. Теперь нам требуется для 2 ресурса PINIO назначить свободную пользовательскую функцию USER1. Для этого вводим команду set PINIO_BOX = 0,40,255,255 Как мы видели ранее первое число 0 это задействованный PINIO 1. Второе число 40 это наша команда для того чтобы к PINO 2 назначить функцию USER1. Третье и четвертое число 255 значит что PINIO 3 и PINIO 4 пока свободен.
7. Незабываем ввести команду save по окончанию настроек.
Значения PINIO (представим несколько):
USER1 - 40
USER2 - 41
USER3 - 42
USER4 - 43
ARM - 0
Свободная ячейка – 255
Предварительные настройки PINIO проведены. Припаиваем провода к полетному контроллеру на настроенные контакты М5 и G.
8. Загружаем снова Betaflight Configurator, подключаем к дрону пульт, переходим во вкладку - приемник. Определяем канал той кнопки, на которую хотим назначит управление нашим контактом. Дергая переключатель на пульте видим что отзывается канал AUX4.
9. Далее переходим во вкладку - режимы. Находим пользовательский режим USER1 и назначаем ему канал управления AUX4. Далее требуется выделить диапазон, в каком тумблер включиться.
10. На этом этапе настройка окончена
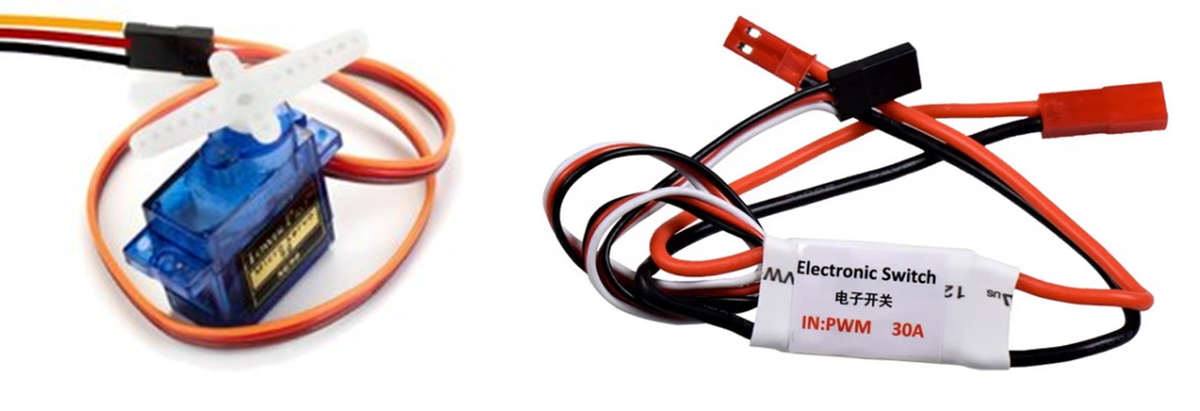
Свитчи (switcher)
FPV video Switcher — это переключатель трёх видеовходов, который позволяет переключать трансляцию с одной камеры на другую на FPV-устройствах, например дронах.
С помощью такого переключателя оператор может выбирать, какая камера будет передавать изображение на экран или очки FPV в реальном времени, также оператор может подавать команду на инициацию боеприпаса.
Electronic switch — это переключатель, управляемый активным электронным компонентом или устройством. Такие переключатели не имеют движущихся частей, в отличие от механических.
Основная функция электронных переключателей — контроль за потоком электрического тока в цепи. У них есть два основных состояния: открытое (выключено) и закрытое (включено). В открытом состоянии электрические контакты внутри переключателя физически разделены, что прерывает путь электрического тока. Когда переключатель закрыт, цепь замыкается, и ток может свободно протекать.
Использование FPV Switcher на примере переключения камер на FPV
Чтобы управлять модулем video switcher применяется кодирование длиной импульса. Принцип работы заключается в изменении длительности импульсов сигнала при постоянной частоте.
Чтобы включить камеру № 1, требуется подать на модуль video switcher импульс частотой 50 Гц , амплитудой 3,3 В и длительностью 1 mS. Соответсвенно для камеры № 2 длительность будет 1,5 mS, а для камеры №3 длительность составит 2 mS.
Подключить такой модуль можно только на полетные контроллеры, имеющие свободный контакт PWM.
С одной стороны мы подключаем провода идущие от двух камер. Соответственно черный GND, красный VCC и желтый - Video.
С обратной стороны модуля мы имеем контакты для подключения третьей камеры (подключается аналогично). Контакты которые мы должны подпаять на полетный контроллер и контакты с полетного контроллера по которым передается сигнал для переключения камер
В нашем случае мы используем полетный контроллер SpeedyBee 405 v3. Он имеет 9 PWM выходов (4 выхода используются под моторы, 4 на контактах M5-M8 и один контакт S9).
Мы будем сигнальный провод подпаивать на контакт М5 (незабываем что кроме сигнального нам требуется подпаять к контактным площадкам GND и 5V).
Далее требуется провести настройки. Работу можно организовать используя две функции полетного контроллера - servo_tilt или channel_forwarding.
Включаем FPV дрон, запускаем приложение Betaflight Configurator и подключаемся к полетному контроллеру. Мы будем использовать функцию channel_forwarding. Поэтому заходим во вкладку «Конфигурация» и включаем channel_forwarding.
После этого обязательно нажимаем на кнопку «Сохранить» в правом нижнем углу.
Далее определим на каком канале находится наш переключатель, который мы будем использовать для управлением переключения камерами и настроим проброску каналов.
Переходим во вкладку приемник и дергаем тумблером, которым будет управляться переключение камер, выбирая канал (ползунок будет дергаться).
Мы определяем тумблер который будет отвечать за управлением переключением камер (в нашем случае используется AUX2). Считая столбцы начиная с нуля мы определеям что AUX2 соответствует канал 5. (Смотрим картинку выше).
Переходим в командную строку и вводим команду:
set channel_forwarding_start = 5
save
Вводим в командную строку команду resource и нажмаем «enter» для того, чтобы посмотреть название того пина (площадки), к которому припаян сигнальный (желтый) провод модуля переключения камерами. В нашем примере мы припаяли желтый провод к площадке «М5». Названием пина для этой площадки является «B00».
Далее освободим наш пин для модуля переключения камер вводом в командную строку следующей команды: resource MOTOR 5 none и назначим освобождённому пину video switcher следующей командой: resource SERVO 1 B00. В завершении сохраняем все изменения вводом команды save.
Electronic switch
3 провода inputs:
Белый провод- управляющий(PWM)
Красный провод- питание (5V)
Черный провод- земля (GND)
2 провода inputs:
Красный провод- питание (+VBAT)
Черный провод- земля (GND)