Полетный контроллер - электронное устройство, представляющее из себя вычислительную cистему, работающую по сложным алгоритмам и управляющую полетом, образно мозг беспилотного летательного аппарата.
Функции полетного контроллера могyт определяться установленной на борту дополнительной периферией (GPS, приёмники и передатчики, OSD, подвес для фото/видеокамеры, датчики тока и напряжения, поисковые средства и т.д.).
Основные задачи выполняемые полетным контроллеров:
- стабилизация аппарата в воздухе;
- передача на землю текущих параметров полета.
У всех FC имеется базовый набор датчиков: гироскоп и акселерометр (определяют текущее расположение дрона в пространстве). Некоторые конфигурации имеют также барометр (определяет высоту полёта, измеряя давление воздуха) и магнитометр/компас (определяет направление полёта).
Обозначения
- 5v, 9v и тд. - Выдаваемое напряжение
- V Batt - напряжение с батареи
- Rx или R - приёмник
- Tx или T - передатчик
- SCL или SDA - подключение к GPS
- Buzz - пищалка
- СС - камера
- Curr - датчик тока
- GND или G - земля
- VO (Vid.out) – вывод видео с пина на VTX
- Vi (Vid.in) – получение видео с камеры
- S (M) – моторы
- Led – подсветка
- Акселерометр - определяет текущее положение дрона в пространстве
- Барометр - определение/удержание высоты, лаком не мазать, иначе приведёт к неадекватному поведению дрона.
- Компас - удержание направления полёта
- UART – обозначается двумя пинами RX, TX и цифрой в конце. К примеру RX3/TX3, RX6/TX6 и тд. Количество UART портов варьируется от микроконтроллера, установленного в ПК.
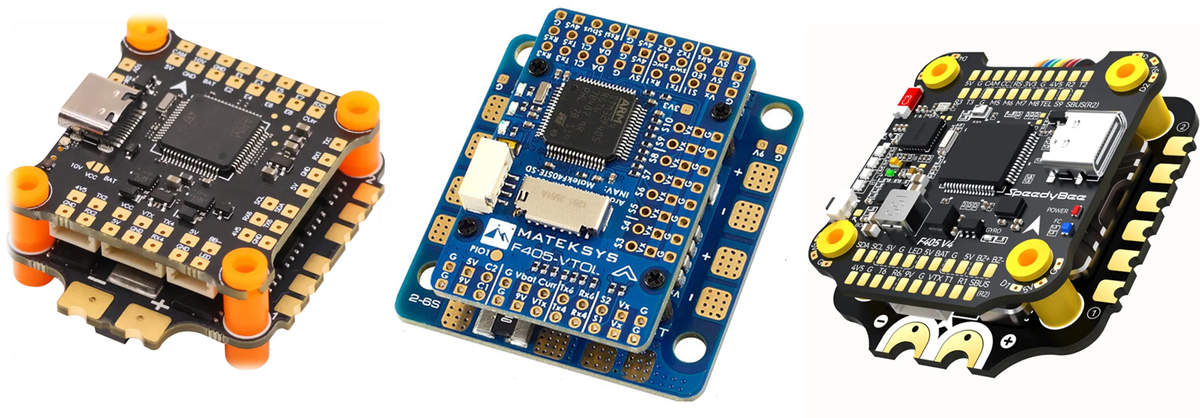
Расположение элементов на ПК
Микроконтроллер (MCU)
ПК использует MCU — микроконтроллер типа STM32, процессор полетного контроллера.
Микроконтроллер состоит из ядра процессора, статической оперативной памяти, флэш-памяти, интерфейса отладки и различных периферийных устройств. Мозг полетного контроллера, который обрабатывает данные. Он запускает программное обеспечение, которое называется «прошивкой» и управляет квадрокоптером, получая данные с различных устройств и датчиков(например с гироскопа, акселерометра, барометра, GPS, компаса, лидаров и т.д.)
В настоящее время STM32, такие как F1 и F3 больше не поддерживаются в Betaflight из-за нехватки памяти для растущих требований к прошивке. Важно обращать внимание на объём памяти, доступный на разных процессорах, — он так же важен, как и скорость.
STM32 — это семейство 32-битных интегральных схем микроконтроллера. MCU, с которого началась эра полетных контроллеров был выпущен в 2007 году.
F1 - это самый медленный процессор. Данный процессор сможет выполнять максимум 2000 расчетов в секунду. Микропроцессор «F4» способен обеспечить более 8К расчетов за одну секунду, а F7 — выдает 32К.
Инерциальный измерительный блок (IMU)
IMU – Inertial Measurement Unit - это система, которая определяет своё положение в пространстве используя свойства инерции тел, то есть определяет на какой угол и по какой оси она была повернута и была смещена относительно начальной точки.
Включает трёхосевые акселерометр, гироскоп и магнитометр, обеспечивающий в общей сложности 9 осей измерения. Основной задачей датчиков на ПК является непрерывное получение навигационных данных для математических расчетов микроконтроллером, который устанавливает положение беспилотника относительно горизонта и обнаруживает изменения углов ориентации, относительно его предыдущего положения в пространстве, затем направляет данные в ESC.
Вычисленные микроконтроллером данные позволяют обеспечивать полет коптером, управляя газом, углами крена, тангажа и рысканья (throttle, pitch, roll, yaw).
Гироскоп измеряет угловую скорость, а акселерометр — линейное ускорение по трём плоскостям. При управлении дроном в режиме ACRO используется только гироскоп, а в режимах стабилизации (ANGLE, HRZN и др.) для работы требуются и гироскоп, и акселерометр. Акселерометр должен быть установлен на контроллере полёта так, чтобы линейные оси совпадали с основными осями беспилотника.
Гироскоп определяет положения квадрокоптера в пространстве, а акселерометр стабилизирует его в пространстве.
Два критерия выбора гироскопа - частота работы и чувствительность к шумам (электро- и механическим). Самым популярным и надежным считается гироскоп MPU6000.
Барометр нужен для определения, удержания высоты полёта и навигации. Наличие встроенного в контроллер барометра может повысить точность полёта с помощью GPS (например, в режиме GPS-спасения), но это необязательно.
Барометр может быть как встроенным в полётный контроллер, так и располагаться отдельно.
Магнитометр измеряет плотность магнитного потока по осям тангажа, крена и рыскания. Система может использовать эти данные в сочетании с данными акселерометра и гироскопа, чтобы оценить ориентацию самолёта относительно магнитного северного полюса и использовать эту обратную связь для управления угловой скоростью таким образом, чтобы поддерживать желаемое угловое положение по оси рыскания.
Устанавливать полетный контроллер следует на резиновые проставки или любой другой пористый материал, который сможет гасить вибрацию, чтобы частично убрать механические шумы (вибрацию),которые негативно влияют на датчики ПК.
BEC (Battery Eliminator Circuit)
BEC (Battery Eliminator Circuit) — это стабилизатор напряжения питания, маленькая микросхема, которая получает на входе большой ток со скачками напряжения, а на выход отдает “сглаженный” ток с меньшим напряжением, питая “нежную” подключаемую электронику дрона.
От беков на дроне питается все — камеры, приемники радиосигнала с пульта, аналоговые видеопередатчики, системы DJI Air Unit или Walksnail, GPS и тд. На совершенно любом современном полетнике есть как минимум один BEC с выходным напряжением 5V, а на большинстве есть и еще два или больше — на 9-12V и 3.3V.
BEC 9V или 12V служит для питания DJI Air Unit и мощных аналоговых VTX (1Вт и выше). Обычно их выходная сила тока составляет 3, а то и все 4 ампера. Без наличия BEC 9V3А или 10V3A в спецификациях полетника подключать к оному цифровой юнит просто нельзя.
UART (универсальный асинхронный приёмник/передатчик)
Это самое важное соединение в полётном контроллере. Аппаратный последовательный порт, используемый для подключения внешних компонентов, таких как радиоприёмники, видеопередатчики, GPS и т. д. Это способ общения между электронными устройствами (например, полетным контроллером и GPS-модулем) с помощью всего двух проводов. Один провод для передачи (TX), другой для приема (RX).
У каждого UART есть два контакта: один для передачи данных (контакт TX) и один для приёма данных (контакт RX).
Важно помнить, что TX на периферийном устройстве подключается к RX на FC, и наоборот. Для устройства необходимо подключить TX и RX с одинаковым номером. Для некоторых устройств требуется подключить только TX или RX, если двусторонняя связь не нужна. У полётных контроллеров ограниченное количество UART-портов; у некоторых их до 6, в то время как у небольших полётных контроллеров их может быть всего 2. Это зависит от процессора и доступного пространства.
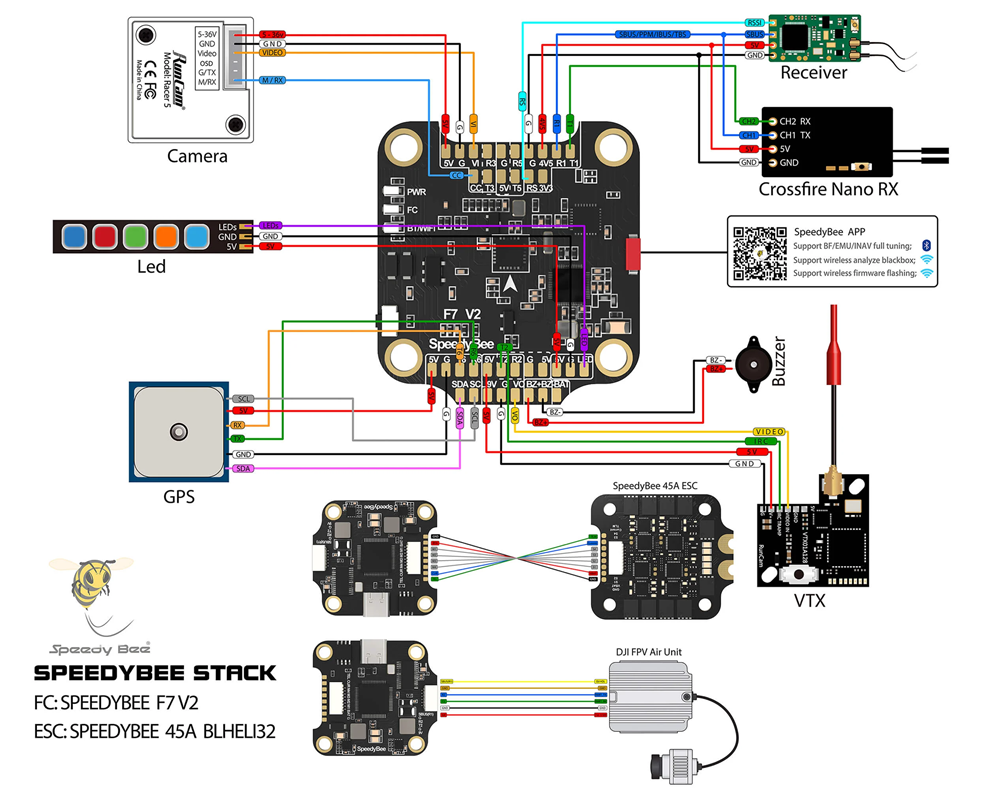
Стек (Stack)
Такая система (FС + ESC) называется башней или стеком (Stack), так как образуется что-то похожее на башню из плат. Расположение плат в форме башни или стека экономит место и очень популярно на коптерах. Бывают стеки даже из 3 или 4 плат.
Стэк из FC SpeedyBee F405 V4 и ESC SpeedyBee BLS 55A 4-in-1
Для подключения FC и ESC используйте кабель 8-pin, идущий в комплекте.
Или припаяйте 8 проводами к 8 площадкам на каждом конце.
Вариант 1 - При помощи кабеля 8-pin
Какой стороной JST кабеля 8-pin вы будете соединять FC и ESC значения не имеет.
Вариант 2 - Прямая пайка
Припаяйте 8 проводов к 8 контактным площадкам, на каждом конце, согласно приведенной ниже схеме.
Полетный контроллер SpeedyBee F405 V4
- RED LED - Индикатор питания. После включения Постоянно горит красным.
- GREEN LED - Статус Bluetooth подключения. Постоянное свечение означает, что Bluetooth связь установлена.
- BLUE LED - Индикатор состояния полетного контроллера, установлена ли на него соответствующая прошивка.
- Orange LED - Предназначен для обозначения текущего режима управления светодиодами. Служит для идентификации чем именно управляются 4 набора светодиодных лент, подключенных к контактным площадкам LED1-LED4 по углам полетного контроллера - прошивкой Betaflight (режим BF_LED) или чипом Bluetooth (режим SB_LED).
Постоянно горит: это означает, что 4 светодиода находятся в режиме SB_LED.
Когда полетный контроллер включен и находится в режиме ожидания нажатия на кнопку BOOT будут переключать схемы отображения светодиодов.
Выключен: Светодиодная лента управляется прошивкой Betaflight. Переключение между BF_LED и SB_LED режимами осуществляется нажатием и удержанием кнопки Boot на протяжении 3 секунд.
Регулятор оборотов SpeedyBee BLS 55A 4-in-1 ESC
Примечание1: Для предотвращения выхода стека из строя из-за скачков при подаче питания, настоятельно рекомендуем использовать электролитический конденсатор с низким импедансом идущим в комплекте.
Примечание2: Полетный контроллер и регулятор оборотов могут быть соединены методом прямой пайки.
Прошивка полетного контроллера (FC)
Полётные контроллеры можно прошивать и гибко настраивать с помощью специальных программ (конфигуратор), таких как Betaflight, INAV и Ardupilot.
Программное обеспечение ПК (прошивка) - это набор правил и алгоритмов, которые обрабатывает процессор и управляет всем оборудованием.
Для каждого ПО разработан свой конфигуратор — это специальная программа, которая загружает в полетный контроллер программное обеспечение и позволяет наглядно и удобно настраивать свой коптер, благодаря графическому интерфейсу прошивки.
Программы (конфигураторы) полетных контроллеров (FC)
Betaflight
Betaflight Configurator — это официальное графическое приложение для настройки полетных контроллеров с прошивкой Betaflight. Оно позволяет гибко конфигурировать параметры дрона без необходимости использования командной строки (CLI), хотя CLI также доступен для продвинутых пользователей.
Основные возможности:
1. Подключение
Поддерживает подключение через USB (UART) или Bluetooth (если контроллер имеет модуль).
2. Настройка Полетных Режимов
- Acro (полный ручной контроль, без стабилизации).
- Angle (автоматическая стабилизация по углам).
- Horizon (гибридный режим: стабилизация + акробатика).
- Air Mode (постоянная работа PID даже при нулевом газе).
- Beeper (пищалка для поиска дрона).
- Turtle Mode (режим "черепахи" для переворота после падения).
3. Настройка PID и Фильтров
- Регулировать PID-коэффициенты (Pitch, Roll, Yaw).
- Настраивать фильтры шумов (RPM Filtering, Gyro Lowpass).
- Включать Dynamic Notch Filter для подавления вибраций.
4. Настройка Receiver (Приемника)
- Поддержка протоколов: SBUS, IBUS, CRSF, Spektrum, PWM.
- Калибровка стиков пульта и проверка каналов.
5. OSD (On-Screen Display)
- Настройка информации, отображаемой на FPV-очках/экране
6. Blackbox Logging
- Запись данных полета (гироскоп, моторы, PID) для анализа.
- Поддержка SD-карты или флеш-памяти контроллера.
7. Motor Control
- Тест моторов (без пропов).
- Настройка направления вращения.
- Активация 3D-режима (реверс моторов).
Совместимость:
- ОС: Windows, macOS, Linux (через Chrome или приложение).
- Контроллеры: Все FC с Betaflight (STM32F4/F7/H7).
- Версии: Поддерживает Betaflight 4.3+, но работает и со старыми версиями.
INAV
INAV Configurator — это официальное программное обеспечение для настройки и прошивки полетных контроллеров, работающих под управлением прошивки INAV (альтернативы Betaflight с акцентом на автономные полеты и GPS-навигацию).
Основные возможности:
1. Прошивка контроллера
- Поддержка онлайн-загрузки последних версий INAV прямо из интерфейса.
- Возможность полной очистки памяти (Full Chip Erase) перед прошивкой для избежания конфликтов.
- Совместимость с популярными контроллерами: OMNIBUSF4, Matek, Holybro и др.
2. Настройка аппаратной части
- Калибровка датчиков:
- 6-осевая калибровка акселерометра (более точная, чем в Betaflight).
- Проверка работоспособности гироскопа, барометра, GPS.
- Конфигурация моторов и ESC:
- Поддержка DShot, PWM, Oneshot.
- Настройка RPM-фильтрации для снижения вибраций.
3. Режимы полета
- Автономные функции:
- Return to Home (RTH) — автоматическое возвращение.
- Waypoints — полет по точкам.
- Loiter — удержание позиции с GPS.
- Ручные/полуавтоматические режимы:
- Angle (стабилизация), Horizon (гибридный), Acro (ручной).
4. Настройка периферии
- GPS: Выбор протокола (UBLOX, NMEA), настройка скорости обмена данными.
- Телеметрия: Поддержка CRSF, SmartPort, FPort.
- OSD (экранное меню)
5. Дополнительные функции
- Blackbox: Запись и анализ логов полета.
- USB MSC Mode: Доступ к SD-карте контроллера как к USB-накопителю (удобно для извлечения логов).
Совместимость:
- ОС: Windows, macOS, Linux (включая Raspberry Pi).
- Версии INAV: Configurator 8.x работает только с INAV 8.x (обратная совместимость отсутствует).
- Аппаратная поддержка:
- Контроллеры на STM32F4/F7/H7.
- Датчики: BMI088, MPU6000, GPS u-blox.
QGroundControl
QGroundControl — это кроссплатформенная наземная станция управления (GCS) с открытым исходным кодом, предназначенная для работы с дронами, поддерживающими протокол MAVLink. Она активно используется для управления автономными системами на базе PX4 и ArduPilot, включая мультикоптеры, самолеты, VTOL-аппараты.
Основные возможности:
1. Универсальность и совместимость
- Поддержка автопилотов: PX4, ArduPilot и любых других систем, использующих MAVLink.
- Типы аппаратов: Квадрокоптеры, самолеты, вертолеты, катера, подводные аппараты (ArduSub).
- Платформы: Windows, macOS, Linux, Android, iOS.
2. Планирование миссий
- Интуитивный интерфейс: Drag-and-drop создание маршрутов с путевыми точками.
- Сложные сценарии: посадок в разных локациях, Orbit, Guided GoTo.
3. Дополнительные функции
- Blackbox-анализ: Запись и просмотр логов полета 3.
- Виртуальный джойстик: Поддержка ручного управления.
4. Настройка и калибровка
- Калибровка датчиков: Акселерометр, гироскоп, компас, барометр.
- Конфигурация ESC и моторов: Назначение каналов, тест вращения.
- Параметры: Единый интерфейс для редактирования параметров PX4/ArduPilot.
5. Управление в реальном времени
- Телеметрия: Отображение данных о батарее, скорости, высоте, GPS-координатах.
- 3D-вид: Загрузка карт OpenStreetMap для визуализации миссий.
- Multi-vehicle: Управление несколькими дронами одновременно.
Аппаратная совместимость:
1. Полетные контроллеры
- PX4-совместимые: Pixhawk 4, Holybro Kakute, Matek, CUAV.
- ArduPilot-совместимые: APM 2.x, Pixhawk 1-6, CubePilot.
2. Периферийные устройства
- GPS: u-blox (NEO-7M, NEO-8M), Here+.
- Телеметрия: Радиомодули 3DR, ESP32, Wi-Fi (подключение через TCP/UDP).
- Камеры: Поддержка видеостриминга с наложением OSD
Mission Planner
Mission Planner — это мощная наземная станция управления (GCS) с открытым исходным кодом, разработанная для работы с автопилотами на базе ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub). Она предоставляет комплексный инструментарий для планирования миссий, настройки аппаратуры, анализа полетов и даже симуляции.
Основные возможности:
1. Планирование миссий
- Создание маршрутов с путевыми точками (Waypoints) через интерактивные карты (Google Maps, Bing, OpenStreetMap).
- Генерация автоматических сеток для аэрофотосъемки (Area Scan).
- Добавление геозон (Geofence) и точек аварийной посадки (Rally Points).
2. Настройка и калибровка
- Калибровка датчиков: акселерометр, компас, барометр.
- Конфигурация PID-регуляторов, ESC и моторов.
- Поддержка параметров ArduPilot с возможностью сохранения/загрузки профилей.
3. Управление и мониторинг
- Отображение телеметрии в реальном времени (высота, скорость, заряд батареи, GPS-координаты).
- 3D-вид полета и траектории миссии.
- Ручное управление через виртуальный джойстик.
4. Анализ полетов
- Загрузка и анализ логов (DataFlash Logs) с графиками и привязкой к карте.
- Интеграция с Google Earth для визуализации маршрутов.
5. Симуляция (SITL/HITL)
- Запуск Software-in-the-Loop (SITL) для тестирования миссий без реального дрона.
- Поддержка аппаратной симуляции (Hardware-in-the-Loop).
Совместимость
1. Аппаратная платформа:
- Pixhawk (1-4), CubePilot, APM 2.x.
- Периферия: GPS (u-blox), телеметрия (3DR, RFD900), камеры.
2. Программная поддержка:
- Все прошивки семейства ArduPilot (Copter, Plane, Rover, Sub).
- Протокол связи: MAVLink.
3. ОС: Windows (рекомендуется), Linux (через Wine), Android (мобильная версия) .