Есть вопрос, который редко задают вслух, но который неизбежно возникает у каждого, кто всерьёз занимается силовой электроникой: что именно держит напряжение на выходе блока питания в момент резкого броска тока нагрузки? Первый ответ, который приходит в голову, звучит уверенно: обратная связь, ШИМ-контроллер, петля регулирования. Всё верно. Но только до определённой частоты. Выше неё картина меняется кардинально, и единственным реальным барьером между стабильным питанием и шумным хаосом остаются выходные конденсаторы с их параметрами, которые большинство разработчиков привыкли считать второстепенными.
Понять, почему это так, можно только разобравшись в том, как формируется выходной импеданс стабилизатора на разных участках частотного диапазона. Это не абстрактная теория, это практика, от которой напрямую зависит поведение питаемой схемы в переходных режимах.
Как петля обратной связи формирует выходной импеданс на низких частотах
Если подключить к выходу стабилизатора анализатор импеданса и построить зависимость |Z(f)|, картина окажется неожиданно богатой. Выходное сопротивление не остаётся постоянным, оно проходит через несколько принципиально разных режимов по мере роста частоты.
На постоянном токе и в области низких частот выходной импеданс определяется глубиной петли обратной связи. Чем выше коэффициент усиления разомкнутой петли, тем ниже Z на выходе. Для хорошо спроектированного LDO-регулятора или ШИМ-конвертера это могут быть единицы миллиом. Петля активно подавляет любые отклонения напряжения, воспринимая их как ошибку и немедленно компенсируя. В этой зоне стабилизатор действительно ведёт себя близко к идеальному источнику напряжения.
Затем наступает переходная область. По мере приближения к частоте среза петли усиление начинает падать. Выходной импеданс растёт, причём его характер меняется с резистивного на индуктивный. Это не случайность и не артефакт схемы: математически неизбежное следствие однополюсной передаточной функции усилителя ошибки. Закрытый контур обратной связи формирует эффективную выходную индуктивность, величина которой пропорциональна отношению разомкнутого выходного сопротивления к произведению коэффициента усиления на ширину полосы. Чем меньше ток нагрузки, тем выше эта эффективная индуктивность, что особенно важно учитывать при проектировании систем с переменной нагрузкой.
Граница в 100 кГц за которой регулятор перестаёт успевать
Полоса пропускания петли обратной связи в типичном ШИМ-конвертере ограничена примерно десятой частью частоты коммутации. При коммутационной частоте 500 кГц частота среза петли составляет порядка 30–50 кГц. У большинства LDO-регуляторов полоса петли ещё скромнее: от единиц до нескольких десятков килогерц. Это физическое ограничение, а не конструктивный просчёт. Усиление нельзя поднять произвольно высоко без риска потерять запас по фазе и получить нестабильную систему.
Что это означает на практике? Если нагрузка потребляет импульс тока с фронтом 100 нс, а именно так ведут себя современные FPGA, процессоры и силовые ключи, контроллер физически не успевает отреагировать. За время нарастания фронта петля обратной связи сделает ноль полезной работы. Вся задача по удержанию напряжения ложится на конденсаторы.
Это момент, который стоит понять не как формальный технический факт, а как смысловой сдвиг в проектировании. Разработчик, сосредоточенный только на компенсации петли и убеждённый, что хороший ШИМ-контроллер сам разберётся с переходными процессами, рискует получить схему, которая нормально работает в статике и отвратительно ведёт себя в динамике.
Реальная модель конденсатора и её роль выше полосы петли
Выше полосы петли выходной конденсатор перестаёт быть просто фильтрующим элементом и становится единственным источником тока для нагрузки. Именно поэтому его характеристики должны анализироваться в частотной области, а не сводиться к одному числу ёмкости.
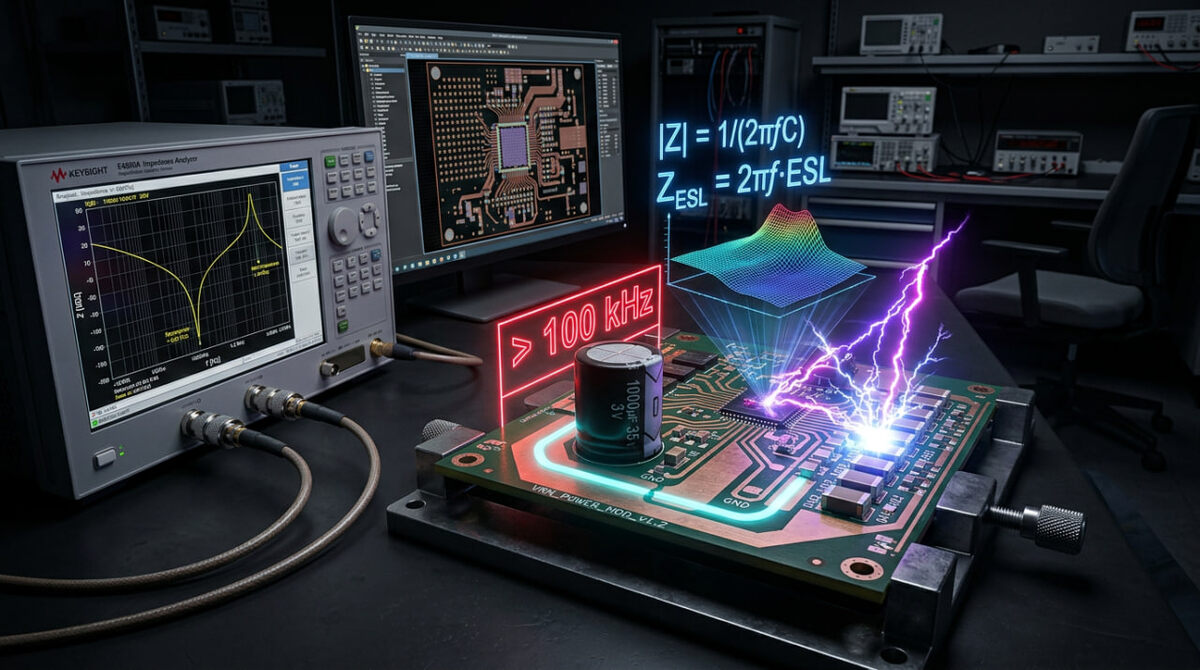
Реальный конденсатор описывается последовательной RLC-цепью: ёмкость C, эквивалентное последовательное сопротивление ESR и эквивалентная последовательная индуктивность ESL. Каждый из этих параметров доминирует на своём участке частотной оси. До частоты собственного резонанса конденсатор ведёт себя преимущественно ёмкостно: его импеданс снижается с ростом частоты по закону 1/(2πfC). В точке резонанса импеданс минимален и равен ESR. Выше резонанса конденсатор превращается в индуктор с паразитным сопротивлением ESR, и его импеданс снова начинает расти пропорционально 2πf·ESL.
Для электролитического конденсатора 220 мкФ с ESL порядка 20–40 нГн частота собственного резонанса лежит в диапазоне 50–100 кГц. Это значит, что именно в той области, где петля уже молчит, электролит перестаёт быть конденсатором и начинает вести себя как индуктор. Это не просто снижение эффективности: смена знака реактивной составляющей импеданса несёт с собой все вытекающие последствия для переходных процессов.
Многослойные керамические конденсаторы (MLCC) имеют принципиально иные паразитные параметры. Корпус 0402 типичен для ESL порядка 0,4–0,8 нГн, корпус 0603 даёт около 1 нГн. Частота резонанса для керамики 10 мкФ в корпусе 0402 находится в районе 2–3 МГц, а для 0,1 мкФ того же корпуса поднимается до 10–20 МГц, что перекрывает весь практически значимый диапазон быстрых переходных процессов. Именно поэтому MLCC стали стандартом для высокочастотного развязывания питания в современных цифровых системах.
Антирезонанс при параллельном включении конденсаторов разных типов
Практически ни один серьёзный блок питания не обходится одним типом конденсаторов. Типичное решение: большой электролит для накопления энергии и набор керамических конденсаторов для высокочастотного развязывания. Казалось бы, достаточно сложить ёмкости и поделить ESR. На деле всё сложнее.
При параллельном включении конденсатора с низким ESR (MLCC, 10 мкФ, ESR около 2 мОм) и конденсатора с высоким ESR (электролит, 220 мкФ, ESR около 150 мОм) суммарный импеданс не является простой параллельной комбинацией двух ёмкостных элементов. В области, где электролит уже перешёл за свой резонанс и стал индуктивным, а MLCC ещё ведёт себя как конденсатор, возникает LC-контур с потенциально высокой добротностью. Этот контур способен резонировать, и тогда на частоте антирезонанса суммарный импеданс батареи конденсаторов оказывается выше, чем у каждого из них по отдельности. Пик антирезонанса в случае низкоомного MLCC и низкоомного LDO с индуктивным выходным сопротивлением может достигать нескольких Ом, что совершенно неприемлемо для питания чувствительных аналоговых или высокоскоростных цифровых цепей.
Правильно подобранный ESR электролитического конденсатора демпфирует этот резонанс. Это один из немногих случаев в силовой электронике, когда паразитный параметр не мешает, а помогает. Классические алюминиевые электролиты с ESR в диапазоне 50–200 мОм обеспечивают естественное демпфирование. Полимерные конденсаторы с ESR 5–20 мОм требуют более внимательного анализа добротности параллельного контура.
Паразитная индуктивность монтажа как физический предел высокочастотного импеданса
Разговор о высокочастотном импедансе был бы неполным без упоминания паразитной индуктивности монтажа. Даже если выбрать конденсатор с ESL 0,3 нГн, его реальная эффективность на плате определяется суммарной петлевой индуктивностью, в которую входит индуктивность виасов, дорожек питания и земляного полигона. Дорожка длиной 5 мм и шириной 0,3 мм добавляет порядка 3–5 нГн. Виас стандартного диаметра вносит 0,5–1 нГн. Итого монтажная индуктивность способна превысить собственный ESL конденсатора в 5–10 раз, полностью нивелируя преимущества дорогого компонента.
Вот почему конденсаторы нужно размещать как можно ближе к точке потребления тока, а не группировать у края платы ради удобства монтажа. Конденсатор, установленный в 1 см от вывода питания процессора, и конденсатор в 5 см от него: с точки зрения высокочастотного импеданса это принципиально разные элементы, хотя их параметры в даташите идентичны.
Производители предлагают конструктивные решения для снижения монтажной индуктивности. Конденсаторы с обратной геометрией (LW reverse) располагают контакты вдоль длинных сторон корпуса, что сокращает внутренний токовый контур и снижает ESL примерно в три раза по сравнению со стандартным MLCC того же размера. Трёхвыводные конденсаторы используют сквозные электроды, формируя ещё более компактный токовый путь, а их ESL в 10 раз ниже, чем у обычного MLCC аналогичной ёмкости.
Как читать импедансную кривую выходного каскада и на что ориентироваться
Измерение выходного импеданса блока питания в широкой полосе частот: задача, которую инженеры нередко откладывают на потом, полагаясь на симуляцию. Однако реальный результат и моделирование расходятся в деталях, критичных именно в высокочастотной области. Паразитные параметры платы, реальная характеристика ESR конденсатора с учётом постоянного смещения и температуры, нелинейность диэлектрика MLCC под напряжением: всё это меняет форму импедансной кривой непредсказуемо без измерения.
Результат измерения в нормально спроектированной системе выглядит следующим образом. В диапазоне до нескольких килогерц импеданс низкий и практически резистивен: это зона работы петли. Затем начинается рост с индуктивным наклоном (+20 дБ/декада): петля теряет эффективность. После частоты среза петли кривая продолжает расти, пока её не перехватывает резонанс выходного LC-фильтра для Buck-конвертера или суммарный импеданс батареи конденсаторов. Дальше, если батарея конденсаторов подобрана корректно, кривая входит в зону минимума: это ESR доминирует над реактивными составляющими. На ещё более высоких частотах кривая снова ползёт вверх из-за ESL, и здесь уже ничто не помогает, кроме физического сокращения монтажных контуров.
Хорошей практикой считается держать выходной импеданс ниже 50 мОм во всей полосе от постоянного тока до 100 МГц для питания современных цифровых систем. Для аналоговых схем с высоким требованием к чистоте питания ориентир строже: единицы миллиом в звуковом диапазоне и не более 10–20 мОм до нескольких мегагерц.
Разработчики, которые понимают эту картину целиком, закладывают конденсаторную батарею не по принципу "чем больше, тем лучше", а по результатам анализа импедансного профиля в целевой полосе частот. Они выбирают тип конденсатора исходя из его поведения именно там, где петля уже безмолвствует. Напряжение на шине питания в момент переходного процесса равно произведению тока на импеданс в этой точке на данной частоте. Если процессор потребляет импульс 1 А за 10 нс, спектральные составляющие такого импульса простираются до сотен мегагерц. При импедансе шины 1 Ом на 100 МГц просадка напряжения составит 1 В, что для ядра с питанием 1,0 В означает полный сбой логики. Именно поэтому проектирование питания высокоскоростных систем давно вышло за рамки выбора "хорошего" контроллера с быстрой петлей. Частотная область выше 100 кГц живёт по своим законам: здесь нет активного регулирования, нет петли, нет контроллера. Есть только импеданс пассивных элементов, геометрия монтажа и понимание инженера, который всё это рассчитал заранее.