Инженеры из Калифорнийского университета в Беркли разработали систему PHP (Perceptive Humanoid Parkour). Система позволяет роботам-гуманоидам автономно выполнять сложные прыжки, залезать на высокие объекты и преодолевать полосы препятствий, используя зрение и динамику движений, характерную для профессиональных атлетов.

Обучение с подкреплением и «зрение» робота. Главная сложность паркура заключается в том, что робот должен соотносить свои физические параметры с геометрией объектов в реальном времени. В системе PHP сначала узкие специалисты-алгоритмы обучаются выполнять один конкретный трюк в симуляции. Затем все эти навыки объединяются в единую нейросеть, которая управляется визуальным потоком (картами глубины). Это позволяет роботу «чувствовать» дистанцию и инерцию, избегая падений при резкой смене типа движения.
Исследователи поставили перед собой цель наделить машины не просто устойчивой походкой, но и настоящей ловкостью человека. Для этого они использовали видеозаписи реальных движений трейсеров, занимающихся паркуром. Процесс обучения проходил в несколько этапов: сначала массив данных разбивался на отдельные элементарные навыки, а затем с помощью обучения с подкреплением робот учился комбинировать их в плавные цепочки. Работа размещена на сервере arxiv.
Одной из главных трудностей в робототехнике остается сочетание физической устойчивости с точностью и скоростью движений. Как отмечают авторы работы: «Последние достижения в передвижении роботов-гуманоидов позволили добиться стабильной ходьбы по пересеченной местности, но воссоздание маневренности и адаптивности динамичных человеческих движений остается открытой проблемой». Предложенная архитектура решает этот вопрос через модульный подход, где за планирование пути отвечает нейросеть, анализирующая данные с бортовых камер.
От цифровой модели к реальным прыжкам
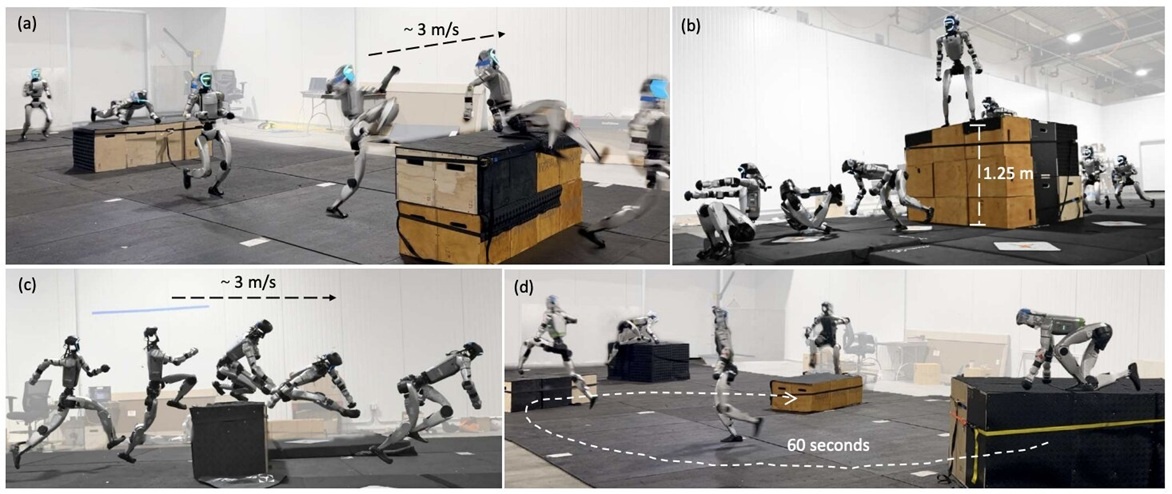
Практические испытания проводились на роботе Unitree G1, который продемонстрировал впечатляющие результаты. Робот преодолевал препятствия высотой до 1,25 метра, что составляет 96% от ее собственного роста.
Робот самостоятельно принимал решения о том, стоит ли ему перешагнуть преграду, запрыгнуть на нее или использовать перекат для спуска. Все это происходило в режиме реального времени: система адаптировалась к изменениям окружения без предварительно прописанного маршрута. Благодаря интеграции глубокого обучения и сенсорного восприятия, робот научился эффективно распределять усилия моторов для совершения рывков и прыжков.
В будущем такие технологии станут фундаментом для создания роботов-спасателей, способных работать в зонах катастроф, где ландшафт слишком сложен для обычных колесных или шагающих платформ. Разработка открывает путь к созданию автономных помощников, чья мобильность вплотную приблизится к человеческим возможностям или даже превзойдет их в опасных для жизни условиях.