Подвес камеры Topotek ASV290G610 (аналог KHP290G609) представляет собой сложный электромеханический узел, который отвечает за стабилизацию камеры в пространстве, компенсируя вибрации, толчки и изменение положения беспилотного летательного аппарата.
Без точной калибровки работа подвеса становится хаотичной: моторы могут не успевать отрабатывать возмущения, либо, наоборот, создавать излишние колебания. Камера начинает беспорядочно дергаться в разные стороны. Знакомо? Сегодня мы попробуем исправить этот недостаток и подготовить камеру к работе.
Ввиду того, что наша тестовая камера имеет недостаток, статья будет состоять из двух частей. В первой части мы разберем камеру и осуществим ремонт шлейфа. Тут будет очень много фото. Если потребуется раздел с калибровкой, то переходим сразу ко второй части статьи.
Ремонт камеры Topotek ASV290G610: пошаговая разборка и ремонт
Одной из частых проблем с камерами Topotek, являются порванные шлейфы на кронштейне. Выглядит это так.
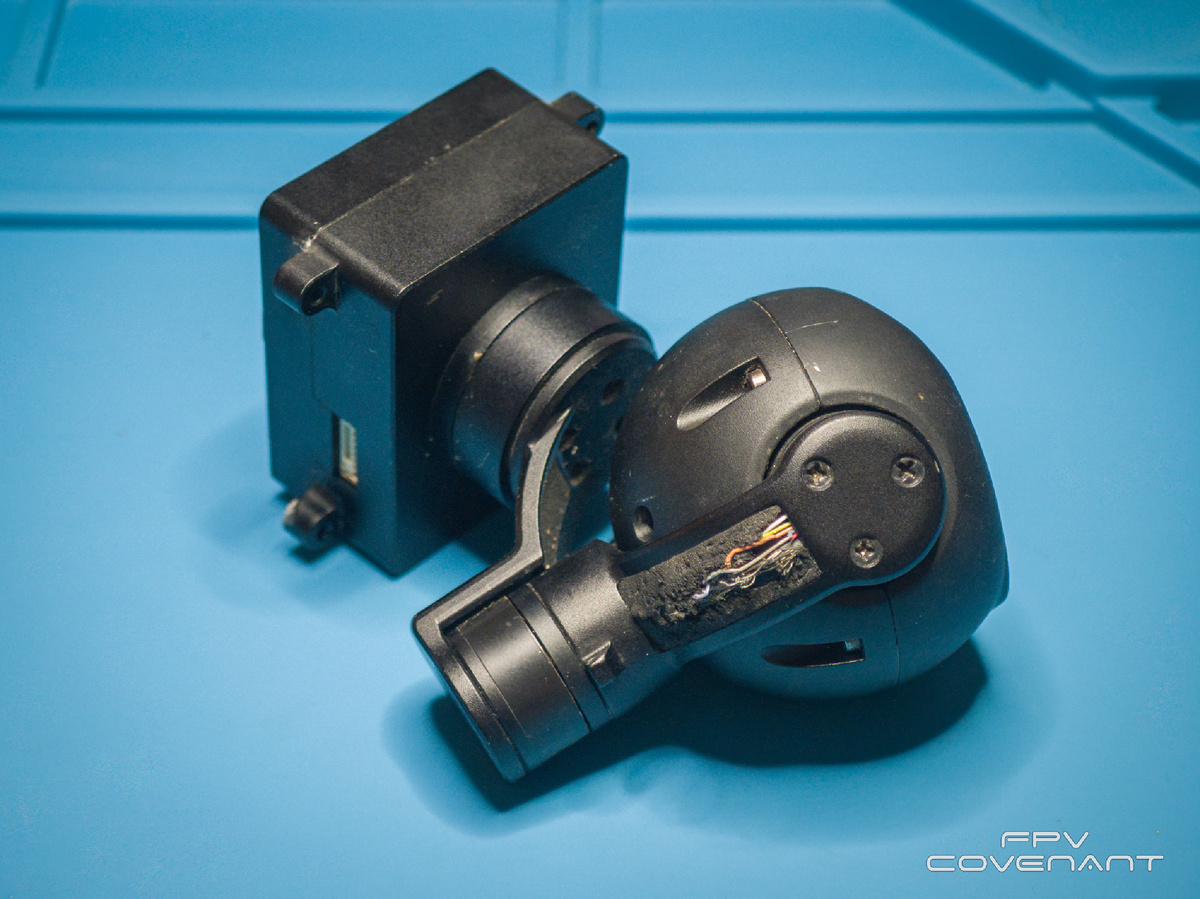
Для замены этих шлейфов потребуется полностью разобрать камеру.
Начнем с того, что открутим крышку подвеса. Внутри мы видим две платы и два провода уходящие сквозь подвес к камере.
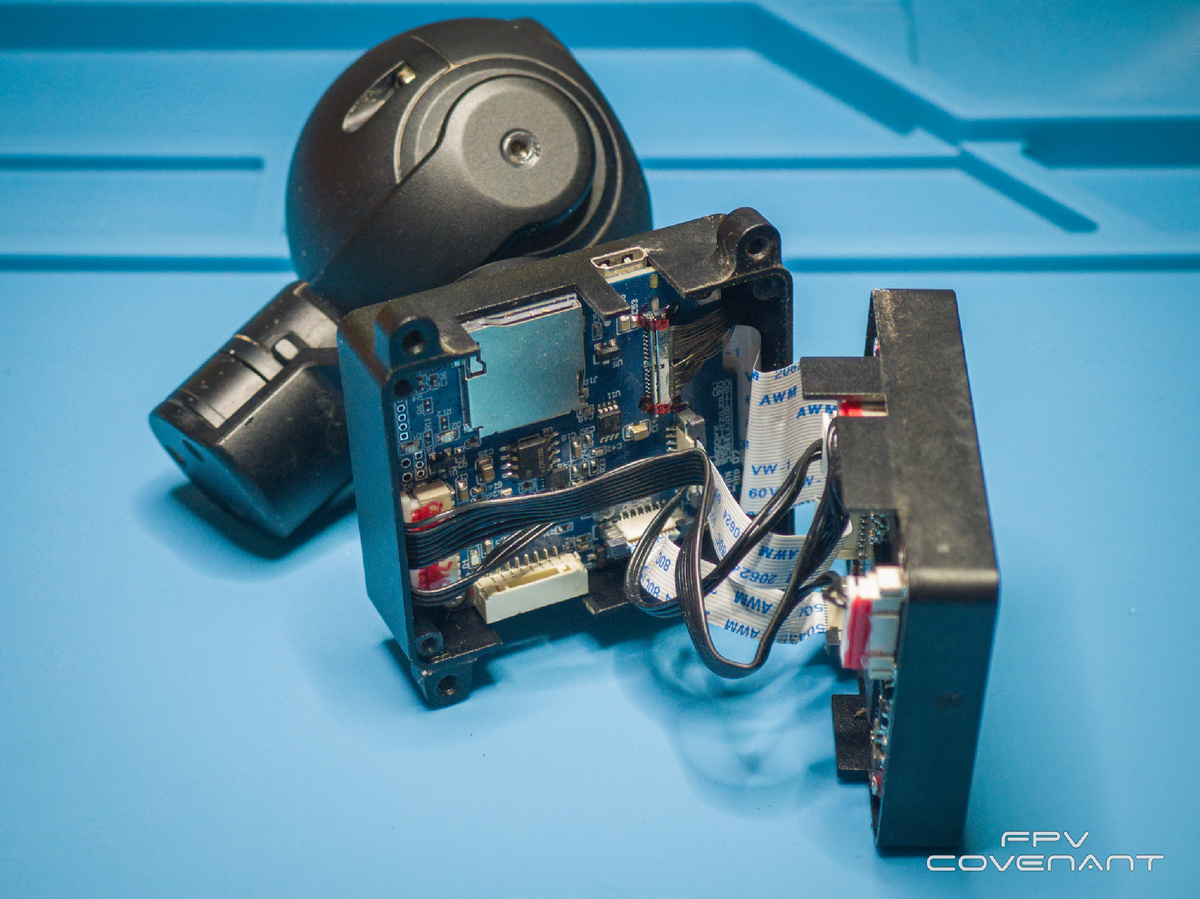
Тут важно все делать осторожно и не спешить. Откидываем два шлейфа и откручиваем плату от нижней части подвеса.
Откручиваем нижнюю часть подвеса и аккуратно просовываем провода, чтобы их не повредить.
Аккуратно разбираем корпус с камерами. Сначала переднюю часть.
Заднюю часть камеры так-же следует откинуть, чтобы получить доступ к блоку камер.
Осторожно требуется отключить три шлейфа от блока камер.
Аккуратно отделяем блок камер от кронштейна подвеса.
Так как нам требуется заменить порванные шлейфы подвеса, продолжаем аккуратно разбирать кронштейн.
Сняв боковые кронштейны подвеса камеры мы видим поврежденные провода. Обязательно следует маркировать отверстия на моторах, чтобы при сборке не провернуть их верх ногами.
Когда произведена полная разборка, обязательно требуется замерить длину на которую проходит шлейф через мотор. Замененный шлейф следует пропустить на такое-же расстояние.
Итак, берем ремонтный набор и начинаем сборку в обратном порядке.
Как мы уже отметили выше, пропускаем шлейф на замеренную заранее длину.
В процессе сборки детали подвеса следует очищать от грязи с помощью технического спирта.
Один из моторов оказался с оторванными проводами.
Аккуратно прикручиваем мотор к кронштейну и просовываем шлейф сквозь мотор.
Приготовим паяльный набор для восстановления провода.
Цвета от старых проводов совпадают с цветами ремонтных. Очень удобно.
Обязательно заливаем контакты жидкой изолентой.
Далее нам требуется восстановить оборванные провода на другой части кронштейна.
Аккуратно пропаиваем новые провода согласно цветам.
И заливаем жидкой изолентой.
Собираем кронштейн в обратном порядке и устанавливаем модуль камер. Подключаем два новых шлейфа и один старый.
Устанавливаем заднюю крышку и аккуратно прокладываем провода внутри.
Устанавливаем переднюю крышку камеры и прикручиваем нижнюю часть подвеса.
Подкручиваем платы к нижней части подвеса и подсоединяем новый шлейф и один старый.
На этом этапе ремонт нашей камеры окончен. Теперь нам потребуется разобраться с процессом калибровки. О нем мы продолжим во второй части нашего рассказа.
Калибровка подвеса камеры Topotek: пошаговое руководство
В калибровке камеры Topotek есть некоторые особенности. Для этой процедуры требуется использовать преобразователь интерфейсов USB-UART-TTL.
Они бывают в разных исполнениях, но у всех одна особенность - если на модуле есть перемычка на 3.3 вольт и на 5 вольт, то выбираем 3.3 В.
Вставляем модуль в компьютер в USB порт. Мы должны проверить в диспетчере устройств и убедиться, правильность установки драйвера.
Мы видим , что драйвер не установился корректно. Для исправления этого недостатка воспользуемся программой Zadig.
Драйверы удачно установлены. Согласно схемы с распиновкой разъема камеры от производителя требуется изготовить провод.
Два провода у нас будут для питания камеры. Четыре провода TX+,TX-,RX+,RX- будут использованы для разъема Ethernet. Три провода TXD, RXD, GND для модуля преобразователя интерфейсов.
После того как кабель готов, подсоединяем преобразователь интерфейсов подключенный к подвесу и вставляем в компьютер разъем Ethernet.
Проверяем что IP адрес нашей рабочей станции находится в одной подсети с камерой.
Для калибровки подвеса нам потребуется приложение SimpleBGC.
Пробуем подать питание на камеру и запустить приложение SimpleBGC. Желательно камеру с подвесом немного придерживать рукой смягчая удары ограничителей камеры.
Мы должны быстро выбрать com порт нашего преобразователя интерфейсов, подключиться к камере и нажать кнопку - Моторы Выкл. После чего камера должна остановиться.
Если не удалось подключиться к порту, требуется проверить правильно ли вы произвели подключение проводов к преобразователю интерфейсов.
Если ничего не получилось значит возможно нам попалась камера собранная до 2023 года, в ранних моделях для калибровки использовался другой метод подключения.
Разбираем подвес.
Нас интересует разъем J6. На ранних подвесах калибровка осуществляется через этот разъем.
Припаиваем провода в соответсвии со схемой.
К этим проводам подключаем преобразователь интерфейсов и снова включаем камеру и запускаем приложение SimpleBGC.
Соединение с камерой установлено.
Особенностью нашей камеры являлось то, что после краша она дергалась в разные стороны и произвести спокойно калибровку не представлялось возможности. При калибровке камеру требуется переворачивать в разные плоскости, зафиксировав подвесную систему в одном положении.
Изготовим удобную 3D модель для печати на принтере, упрощающую процесс.
Камера вставляется в пазы и фиксируется в центральном положении. Форма куба позволяет с легкостью переворачивать изделие во все плоскости.
Модель напечатана на пластике PLA и входит плотно, другие виды пластиков могут дать усадку - стоит обратить внимание.
Снова подключаем все провода, запускаем приложение SimpleBGC, подключаемся к камере и останавливаем моторы.
Для начала переходим во вкладку Stabilization. Во всех значениях PID Controller - ROLL, PITCH, YAW устанавливаем 3.
Переходим во вкладку Encoders. В строке EL.Field Offset выставляем все значения на 0. В строке Offset, так же выставляем все значения на 0 и нажимаем на кнопку Записать.
Переходим во вкладку HardWare. В столбце NUM POLES должны быть значение ROLL - 8 - INVERT, PITCH - 8 - INVERT, YAW - 14.
Опускаемся ниже скроллингом и выбираем функцию Calibrate IMU sensors.
У нас откроется окно калибровки. В столбце Accelerometer должно автоматически выбраться +Z. Нажимаем Calibrate.
Далее последовательно переворачиваем куб с камерой на каждую плоскость и нажимаем Calibrate.
Снова ставим камеру неподвижно ровно и в разделе Gyroscope нажимаем Calibrate. После чего закрываем окно.
Переходим во вкладку Encoders включаем моторы и нажимаем Calib.EL.Field.
Переходим в приложение Topotek и выставляем стрелками центральное положение.
Снова переходим во вкладку Encoders и нажимаем Calib.Offset
Потребляемый ток в этот момент у камеры должен быть около 250-300 мА.
Переходим во вкладку Stabilization и нажимаем Auto. В открывшемся окне выбираем галочкой Roll, Pitch, Yaw, нажимаем Start и после полученных значений нажимаем Stop.
Снова загружаем приложение Topotek и проверяем работу камеры.
Установив среднее положение стрелками переходим снова в приложение SimpleBGC. В меню выбираем Плата - Action - Set current position as home position.
Еще раз убеждаемся что камера отлично работает и управляется.
Модель куба для калибровки камеры можно скачать тут.
Если наша статья оказалась полезной ставьте лайк или оформите премиум подписку, это позволит нам приобрести новое оборудование, в котором мы очень нуждаемся, но не можем позволить себе приобрести!