Одно короткое сообщение в X (Twitter) взорвало сообщество робототехников: человекоподобный робот Unitree, оснащённый OpenClaw, продемонстрировал не просто навигацию — он начал «понимать» пространство и время.
Робот запомнил людей, объекты и события в комнате; разработчики назвали это Spatial Agent Memory — «пространственной памятью агента». Речь идёт о первом в истории заметном случае, когда открытая платформа дала роботу не только восприятие, но и устойчивую «мировую» память. Это одновременно прорыв и повод для тревог.
Что произошло
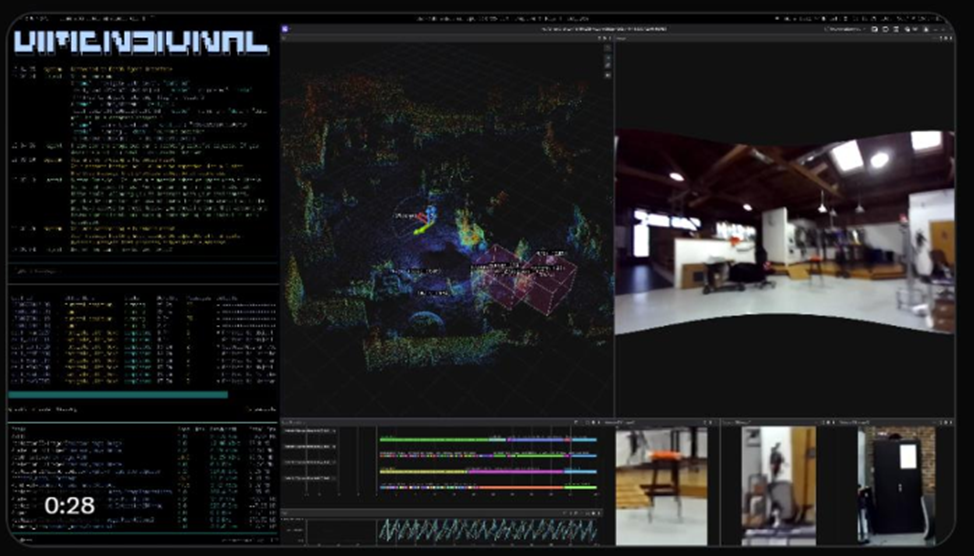
В демонстрационном видео робот, получая данные с LiDAR, стерео- и RGB-камер, собрал многомерную модель окружения и научился отвечать на вопросы вроде «где моя ключница?», «кто был в доме в прошлую среду?» или «кто проводит больше всего времени на кухне?».
Команда использовала OpenClaw вместе с набором модулей, названных SpatialRAG и Spatial Agent Memory — системой, которая объединяет потоковые сенсорные данные в воксельную (voxel) карту с временными и семантическими метками.
Оригинальный пост в X, запустивший обсуждение: оригинальный пост.
Как это работает: кратко о SpatialRAG и памяти агента
Ключевая идея — не просто хранить видео или кадры, а строить многомерный векторный репозиторий мира:
- данные видеокамер, LiDAR и одометрии преобразуются в воксели — маленькие объёмы пространства;
- каждый воксель получает пространственный вектор-встраивание и семантические метки (объект, комната, геометрия, время, изображение, точечное облако);
- поверх этого реализован механизм поиска по объектам, комнатам, времени и семантике (object/room/semantic/geometry/time/image/pointcloud);
- LLM (языковая модель) и агентная инфраструктура OpenClaw служат высокоуровневым координатором: формулируют запросы, выбирают инструменты, выдают пояснения и инструкции исполнительным подсистемам.
Итог: робот получает не просто «записанные» кадры, а структурированную память о том, что, где и когда происходило — и может делать семантические выводы.
Почему это революционно — и почему пугает
Сторонники видят прорыв в «воплощённом интеллекте»: LLM перестают быть лишь «текстовой головой», а получают постоянную привязку к физическому миру — пространственный контекст, временные связи и семантика. Это даёт роботам возможность действительно помогать в доме, логистике, складе, на производстве.
Критики же поднимают вопрос приватности и безопасности: если домашний робот может хранить и анализировать, кто когда и где был, когда приходил гость и каковы привычки жильцов — где гарантия, что эти данные не попадут в чужие руки? Возникают ассоциации с «Тяньванем» — всевидящими системами наблюдения.
Массовая доступность технологии (OpenClaw — open-source и аппаратно-агностичен) делает потенциальную проблему ещё более острой: любой современный LiDAR и камера — и у вас роботор с «мировой памятью».
Аппаратная свобода и универсальность
Avantages: OpenClaw позиционируется как железонезависимое решение. Разработчики демонстрируют, что систему можно запустить на самых разных сенсорных конфигурациях — от профессиональных LiDAR до встроенного LiDAR в старых iPhone.
Поддержка SLAM и динамической обходки препятствий без привязки к ROS делает интеграцию проще для многих платформ: гуманоиды, квадрокоптеры, четырехногие роботы.
Ограничения и реалистичные проблемы
Практика показывает: симуляция ≠ реальный мир. Основные технические вызовы:
- шум сенсоров, конфликт данных от разных источников, влияние освещения;
- стабильность долгосрочной работы: ошибки накопления, отказы аппаратуры;
- вычислительные задержки: высокая частота сенсорики и объёмы данных требуют оптимизаций (авторы говорят, что Spatial Agent Memory — не реальный-time контроллер движения, а «высокоуровневый» координатор);
- безопасность и целостность данных при сетевых подключениях и обновлениях.
Этические и социальные последствия
Вопросы, которые сейчас становятся ключевыми:
- кто контролирует память робота и кто имеет доступ к ней;
- как обеспечить «право на забвение» и удаление локальных записей;
- каким образом регламентировать использование таких систем в частных и публичных пространствах;
- возможное злоупотребление — от коммерческого слежения до запросов государств и военных.
Вывод
Демонстрация OpenClaw с Spatial Agent Memory — важный технологический рубеж: роботы стали не только воспринимать мир, но и формировать устойчивые, семантически насыщенные воспоминания о нём. Это открывает массу полезных приложений, но одновременно требует серьёзной дискуссии об ограничениях, безопасности и этике.
Хотите создать уникальный и успешный продукт? СМС – ваш надежный партнер в мире инноваций! Закажи разработки ИИ-решений, LLM-чат-ботов, моделей генерации изображений и автоматизации бизнес-процессов у профессионалов.
ИИ сегодня — ваше конкурентное преимущество завтра!
Тел. +7 (985) 982-70-55
E-mail sms_systems@inbox.ru
Сайт https://www.smssystems.ru/razrabotka-ai/