Как подключить внешнее устройство управления к роботу Kuka по протоколу EtherNet/IP.
Если для связи и взаимодействия с роботом требуется подключить шкаф управления, используется несколько протоколов, мы сегодня рассмотрим протокол EtherNet/IP.
Для начало нужно обновить каталоги, все каталоги содержатся в файле EDS.
Нужно выбрать - по очереди меню Extras > Управление каталогами DTM
Для подключения данного протокола можно пойти разными методами, можно через компьютер подключенный к роботу войти в программу WorkVisual и установить опцию KRC4 EthernetIP, или подключить флешку (идет в комплекте с роботом) и установить в робота опцию RC4 EthernetIP.
Выделить запись KRC4 EthernetIP и нажать Установить.
Подтвердить запрос на перезапуск нажатием кнопки OK.
Файлы EDS добавляются в библиотеку.
Extras > Управление каталогами DTM
Нажать Искать установленные DTM. Начинается сканирование
каталога.
В области известные DTM отметить нужные файлы и нажать
кнопку Применить
Выбранные файлы отображаются в области Текущий каталог DTM.
Чтобы завершить сканирование каталога, нажать OK
Открывается окно. Выделить запись EtherNet/IP и нажать OK.
Щелкнуть правой кнопкой мыши по записи EtherNet/IP и открыть
меню Функции > Добавить EDS в библиотеку.
Открывается Мастер, нажать на Далее
Нажать Поиск и указать директорию.
Нажать для подтверждения Далее.
Появится список добавляемых в библиотеку файлов EDS.
Нажать для подтверждения Далее.
Завершить.
Вот не большая схема
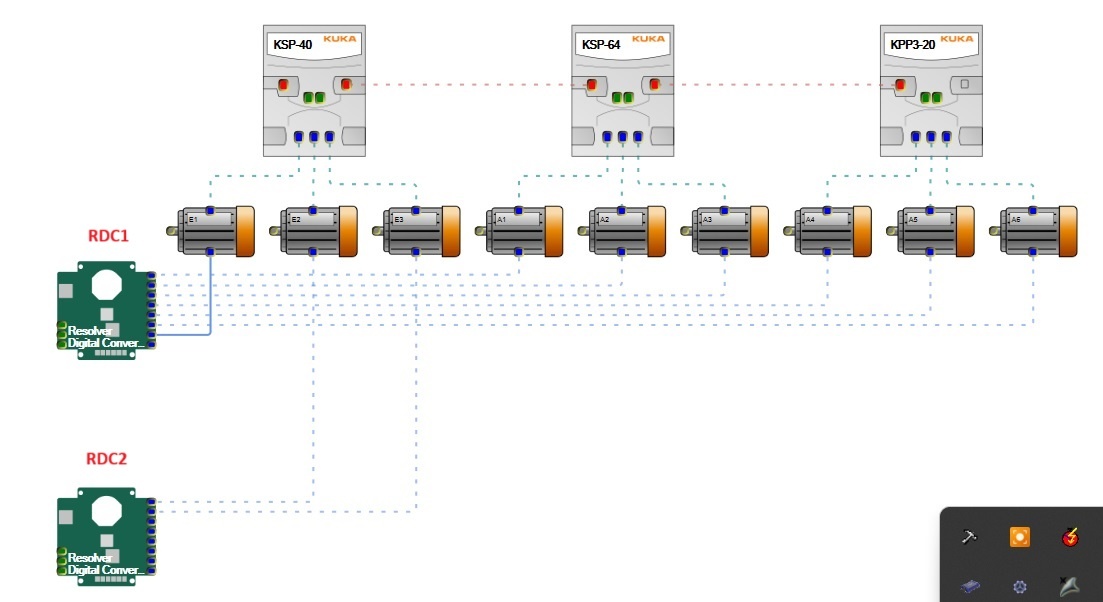

RDC
Далее необходимо! В окне Структура проекта во вкладке Устройства открыть иерархическую структуру системы управления роботом.
2. Нажать правой кнопкой мыши на Структура шины и выбрать в
контекстном меню Добавить.
Открывается окно, выделить запись EtherNet/IP и нажать OK. Запись перенимается в иерархическую структуру.
Щелкнуть правой кнопкой мыши по записи EtherNet/IP и открыть
меню Функции > Добавить EDS в библиотеку.
Открывается Мастер. Нажать на Далее >.
Нажать Поиск и указать директорию, нажать для подтверждения Далее.
Появится список добавляемых в библиотеку файлов EDS.
Нажать для подтверждения Далее. Нажать Завершить.
Файлы EDS добавляются в библиотеку.
Нажать Файл > Закрыть, чтобы закрыть и сохранить проект.
Выбрать последовательность меню Дополнения > Управление
каталогом DTM.
Нажать Искать установленные DTM. Начинается сканирование
каталога.
В области Известные DTM отметить нужные файлы и нажать
кнопку Стрелка вверх. Выбранные файлы отображаются в области Текущий каталог DTM.
Чтобы завершить сканирование каталога, нажать OK.
В окне Структура проекта на вкладке Устройства открыть иерархическую структуру системы управления роботом.
Нажать правой кнопкой мыши на EtherNet IP и выбрать в контекстном меню Добавить.
Открывается окно со списком устройств. Отметить используемое
устройство и нажать Ok. Устройство передается в иерархическую
структуру.
В иерархической структуре щелкнуть правой кнопкой мыши по устройству и выбрать в контекстном меню Настройки. Откроется
окно с данными устройства.
Ввести IP-адрес устройства на вкладке Настройка адреса
Теперь система управления роботом добавлена и активирована.
Узел EtherNet/IP добавлен в структуру шины.
Устройство добавлено в шину и модули устройства назначены слотам.
В иерархической структуре щелкнуть правой кнопкой мыши по устройству и выбрать в контекстном меню Настройки - Откроется
окно с данными устройства. В поле слева от вкладок отображаются модули.
Щелкнуть вид соединения под модулем, например, Rack
Optimization. Отобразятся вкладки Общие - Контроль
идентичности - Настройки конфигурации.
3. Система управления роботом добавлена и активирована.
Узел EtherNet/IP добавлен в структуру шины.
Устройство добавлено в шину и модули устройства назначены слотам.
Далее в иерархической структуре щелкнуть правой кнопкой мыши по устройству и выбрать в контекстном меню Настройки - Откроется
окно с данными устройства. В поле слева от вкладок отображаются модули.
2. Выделить модуль и нажать Удалить соединение.
3. Нажать Добавить соединение.
4. Выбрать вид соединения и подтвердить, нажав OK.
Конфигурирование адаптера EtherNet/IP
Система управления роботом добавлена и активирована.
Узел EtherNet/IP добавлен в структуру шины.
В окне Структура проекта на вкладке Устройства открыть иерархическую структуру системы управления роботом.
В иерархической структуре щелкнуть правой кнопкой мыши по
EtherNet/IP и выбрать в контекстном меню Настройки.
Открывается окно, на вкладке Установки связи заполнить следующие поля:
Начальный адрес области распознавания
Конечный адрес области распознавания
Bus Timeout
IP-адрес сканера
Сохранить настройку, нажав Принять.
На вкладках Локальное подчиненное устройство 1—Локальное
подчиненное устройство 5 можно сконфигурировать локальные
подчиненные устройства.
Только в случае применения предохранительного интерфейса
через CIP Safety: На вкладке Локальное подчиненное устройство безопасности сконфигурировать локальное подчиненное устройство безопасности.
4. Для сохранения настройки нажать Ok.
Начальный адрес области распознавания: При вводе начального адреса выполняется только поиск IP-адресов, которые больше или равны введенному IP-адресу.
Конечный адрес области распознавания: При вводе конечного адреса выполняется только поиск IP-адресов, которые меньше или равны введенному IP-адресу.
IP-адрес сканера: Сканер, это устройство с которого вы подключились к роботу (ПК или ноутбук).
Коммутация входов/выходов в WorkVisual
Скоммутировать входы/выходы в WorkVisual
Имена сигналов EtherNet/IP локальных подчиненных устройств имеют
в WorkVisual следующую структуру