После профессионального моделирования разработки месторождений сложно смотреть на анимацию просто как на картинку. Там привыкаешь, что за каждой визуализацией стоит массив данных и строгая физика пласта. Этот же принцип я перенес в свой проект настольного робота-компаньона.
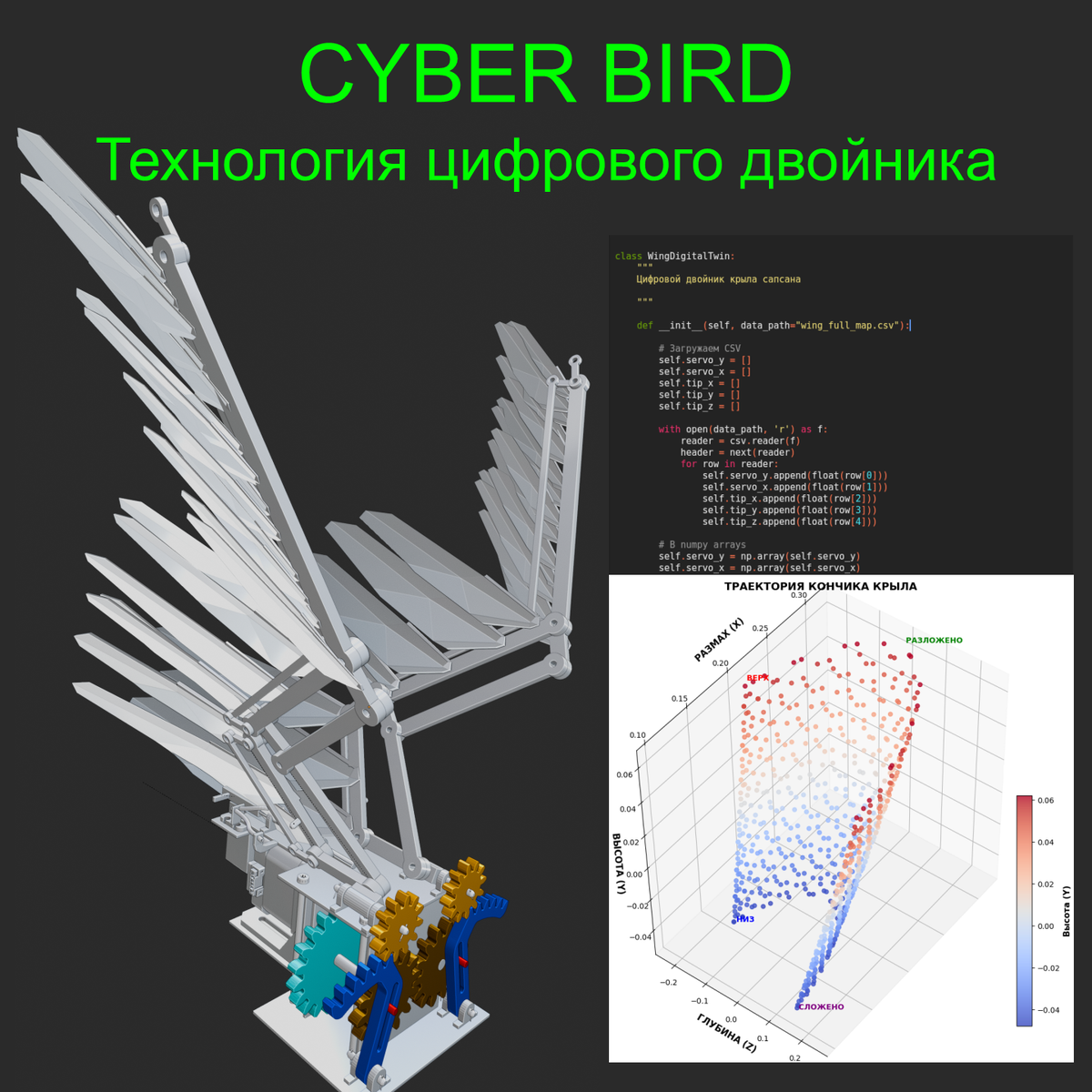
Для меня проект - это кинетическая скульптура, существующая в двух мирах. Пока физический привод машет крыльями на столе, его «цифровой двойник» в Blender совершает виртуальный полет.
Как я учу сталь летать: математика соколиного крыла
Когда я работаю над скульптурой, мне нужна не просто механика, а иллюзия жизни. Чтобы вдохнуть в металл душу хищника, я использую три принципа, подсмотренных у сапсана. Это превращает линейное движение машин в живую, упругую органику.
Почему именно сапсан? Это не просто птица, а совершенный истребитель. Его крыло - чистая геометрия скорости, лишенная пушистых сантиментов. Он способен мгновенно менять площадь крыла вдвое, уходя в пике. Моя задача - повторить эту механику.
Вот как выглядит формула полета в моих контроллерах:
- Асимметрия цикла
В крейсерском режиме удар крыла вниз всегда длиннее, чем подъем. Сапсан тратит время на создание импульса (опора на воздух), а вверх возвращается быстро, чтобы гасить сопротивление. В железе это реализовано через асимметричный синус: удар вниз мощный и плавный, подъем вверх - на 30% быстрее. - Динамическое складывание
Крыло никогда не машет полностью раскрытым. Биомеханика подсказывает: вверх - поджался, вниз - расправился. В моем пантографе за это отвечает тросовая система, связанная с углом маха:
• При подъеме крыло «поджимается» к телу (складывается Z-образно), уменьшая площадь проекции на 30–35%.
• При ударе вниз оно делает рывок, раскрываясь на полную. Причем раскрытие это нелинейное: в последние 10% пути до верхней точки механизм отпускает крыло резко, создавая визуальный «щелчок» готовности к атаке. - «Запаздывание» кисти
В природе суставы не двигаются синхронно - по крылу идет волна. В моей схеме движение начинается с плеча, и только через микро-задержку (10% времени или 15–20 градусов фазового отставания) срабатывает трос на складывание. Это дает эффект «захлеста»: движение становится похоже на гибкий хлыст, а не на жесткий рычаг. - Нелинейная скорость
Я использую закон косинуса вместо равномерного движения. Пик скорости маха вверх смещен к началу, а пик удара вниз - чуть ближе к концу траектории. Это добавляет движениям той самой «животной» резкости.
Итоговая формула движения крыла:
- Время: Подъем быстрее удара на 30%.
- Геометрия: Размах при подъеме уменьшен на треть.
- Фаза: Складывание отстает от взмаха.
- Скорость: Профиль по косинусу.
Благодаря выносу сервопривода в базу и тросовой передаче, мы получаем ускорения, максимально приближенные к реальному броску живого сокола.
Что уже в работе и в планах:
- Концепт и база: Первые наброски схемы пантограф-крыла и отработка динамики на костях в Blender.
- Гибридная механика: Проектирование в FreeCAD. Скрестил шотландский механизм, шаговый двигатель и сервопривод для максимально естественного маха.
- Генеративное оперение: Я инженер, а не художник, поэтому даже в искусстве полагаюсь на алгоритмы. Перья-танто и их раскладку генерирую через Geometry Nodes в Blender.
- Математика движения: Управление кинематикой через Python. Использую CCD-механизм для обучения логики на базе биомеханики Сапсана.
- Математика полета: Написал алгоритм, который связывает частоту взмахов в реальности с расчетной скоростью и высотой в виртуальном пространстве. Телеметрия этого «воображаемого полета» в реальном времени выводится на OLED-дисплей робота.
Железо внутри: ESP32 S3 n16r8, Nema 17, Servo MG996R, магнитные энкодеры MT6701, OLED дисплей TZT0.96, TMC2209.
Первые шаги уже можно увидеть в Клипах, чтобы проследить путь от черновика до металла.
Дальше - больше. Подписывайтесь, будем синхронизировать реальности.
#robotics #esp32 #blender #freecad #python #3dmodeling #робототехника #3dпечать #diy #механика #кинетическаяскульптура