
Испанские ученые решили одну из самых неприятных задач робототехники: что делать, если машина перестала понимать, где находится. С новой системой робот может самостоятельно сориентироваться в пространстве даже после перемещения, отключения питания или кардинальных изменений в окружающем пространстве.
Разработчики из университета Мигеля Эрнандеса в Эльче создали алгоритм MCL-DLF, закрывающий так называемую проблему «похищенного робота». Это устоявшийся термин, ситуация, когда машина теряет привязку к карте и не знает, с какой точки начинать движение. Спутниковая навигация в таких случаях бесполезна — сигнал глушат здания, внутри помещений он пропадает полностью. На камеры полагаться тоже нельзя, ведь освещение постоянно меняется, начинается дождь или туман — и система фактически слепнет.
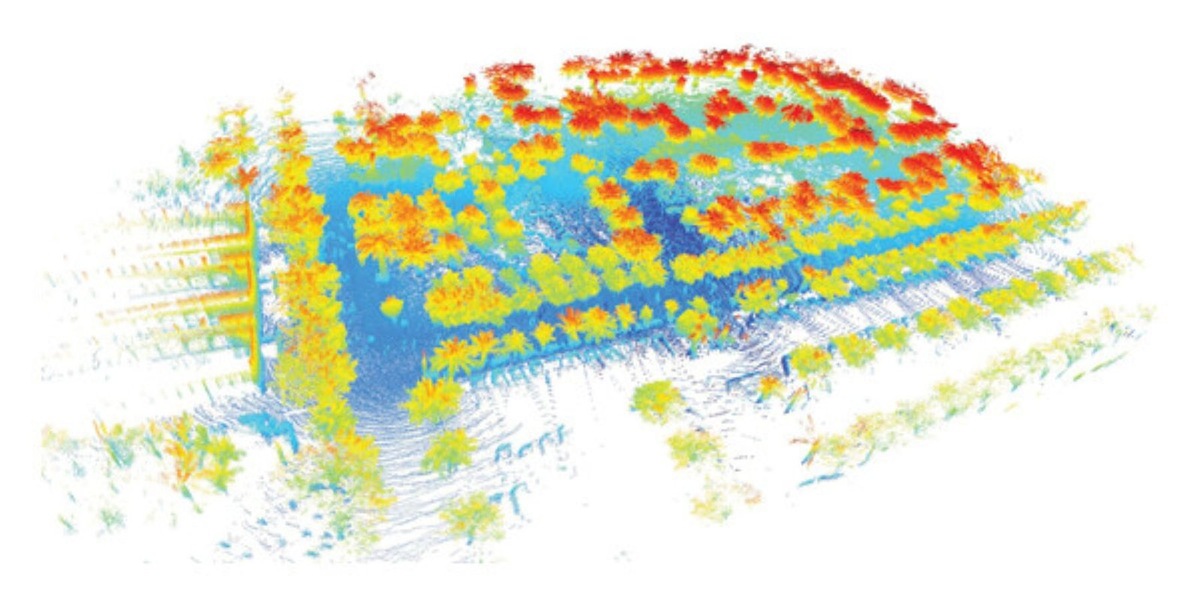
Вместо оптики здесь работает лидар — лазерный дальномер, строящий объемную картину пространства из миллионов точек. Он уверенно работает в темноте при любой погоде. Но и у него есть уязвимость: одно и то же место в разные сезоны выглядит принципиально иначе — листья появляются и опадают, дорожки покрываются снегом. Сопоставить текущую картинку с сохраненной картой становится по-настоящему сложно.
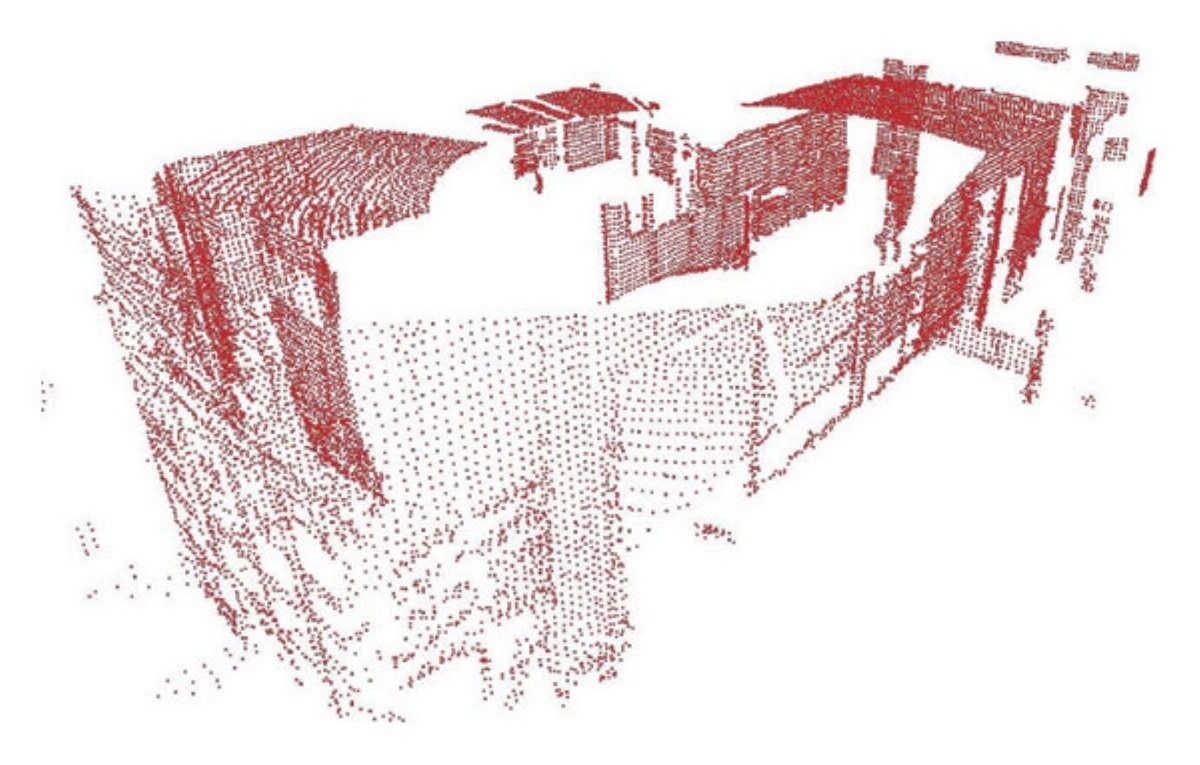
Алгоритм справляется с этим в два шага — примерно как человек, который сначала узнает район, а потом конкретную улицу. На первом этапе по методу Монте-Карло система рассеивает по карте множество гипотез о местонахождении робота и итеративно отсеивает неподходящие. Нейросеть MinkUNeXt при этом сворачивает весь трехмерный скан в компактный вектор из 512 чисел — геометрический «отпечаток» места, которого не могут сбить с пути сезонные изменения. Достигается такое за счет разреженных 3D-сверток: сеть обрабатывает только заполненные точки облака, игнорируя пустое пространство, благодаря чему вычислительная нагрузка сильно снижается. На втором этапе алгоритм RANSAC точно совмещает текущий скан с эталонным, определяя положение машины по всем шести степеням свободы — трем координатам и трем углам ориентации.
Испытания проходили несколько месяцев на территории кампуса в разное время года в коридорах зданий и на открытом воздухе. Дополнительно метод проверяли на публичном наборе данных NCLT Мичиганского университета — 27 маршрутов, отснятых на протяжении 15 месяцев в самых разных погодных условиях.
Сейчас над схожими задачами трудятся и другие команды. Немецкий центр искусственного интеллекта DFKI отрабатывает лидарную навигацию для промышленных роботов в условиях закрытых складов без GPS, американская компания Clearpath Robotics интегрирует аналогичные подходы в одну из своих платформу для автономной работы на стройплощадках.
Зачем же это все нужно? Робот, умеющий «прийти в себя» после сбоя, может помочь в местах, где человеку опасно появляться, — на атомных объектах, в шахтах, при ликвидации техногенных катастроф. Потеря ориентации в таких местах — это уже не технический казус, а реальный риск.
Ранее мы писали о том, что ИИ-агент «напал» на разработчика из-за разногласий.