Cегодня существует огромное количество камер для дронов, начиная от компактных моделей для любительской аэросъемки и заканчивая профессиональными мультиспектральными системами для промышленного мониторинга.
Ведущие мировые производители постоянно соревнуются в качестве матриц, стабилизации и функциональности, однако ключевым отличием между моделями зачастую становятся не только характеристики съемки, но и способы интеграции в полетный контроллер, типы интерфейсов подключения и протоколы управления.
В этом разнообразии особенно выделяются решения, сочетающие в себе легкость, мощь и интеллектуальные функции, и сегодня мы подробно рассмотрим одну из таких разработок — модель Viewpro A609. Эта камера встречается на тяжелом квадрокоптере HeavyShot.
Viewpro A609 представляет собой компактную трехосевую подвесную камеру, выполненную из алюминиевого сплава методом ЧПУ, что обеспечивает ей высокую прочность при минимальном весе всего в 200 грамм.
Эта модель интересна прежде всего своей двойной сенсорной системой, объединяющей возможности электродоптического (EO) и инфракрасного (IR) датчиков. Видеокамера оснащена 6-миллиметровым объективом с фиксированным фокусом и 2-мегапиксельной матрицей, способной записывать видео в формате Full HD 1080p. Она также поддерживает 12-кратное цифровое увеличение, позволяя детально рассматривать удаленные объекты. В свою очередь, тепловизионный модуль с матрицей 640×512 пикселей и 8-кратным цифровым зумом обеспечивает уверенное наблюдение в условиях плохой видимости.
По заявленным характеристикам, камера способна обнаружить автомобиль на расстоянии более километра, а человека — почти за 400 метров, что делает ее эффективным инструментом для поисково-спасательных работ или охранного мониторинга .
Что касается подключения и управления, то Viewpro A609 предлагает гибкие возможности для интеграции. Устройство поддерживает несколько интерфейсов связи, включая UART и SBUS (выбирается пользователем), а также управление по протоколам TCP/UDP, что позволяет легко встраивать камеру в различные полетные контроллеры и наземные станции управления.
Камера передает видеопоток по протоколам RTSP/UDP и поддерживает геотегирование, накладывая на изображение данные о координатах и высоте с борта дрона. Питание устройства осуществляется от напряжений 4S~6S, а все настройки и записи сохраняются на карту памяти microSD объемом до 128 ГБ .
Сегодня мы попробуем подключить эту камеру к полетному контролеру CUAV7 и настроить управление с помощью пульта управления Radiomaster TX12.
Для многих пилотов этот пульт становится оптимальной и бюджетной заменой дорогостоящим специализированным пультам Herelink, которые не каждый может себе позволить.
Поэтому сразу хочется отметить, на дроне установлена система связи Herelink и управление будет организовано через наземную станцию управления с подключенным пультом Radiomaster TX12.
О том как подключить между собой два юнита Herelink мы рассказывали тут:
Сборка станции управления с готовыми моделями для печати на 3D принтере:
Подключение камеры Viewpro A609 к CUAV7: сборка кабеля
Для начала нам потребуется собрать кабель для подключения камеры к полетному контроллеру. Так как разные модели могут незначительно отличаться разъемами, обратимся на сайт производителя для уточнения распиновки.
Для нашей камеры Viewpro A609 схема подключения будет такова:
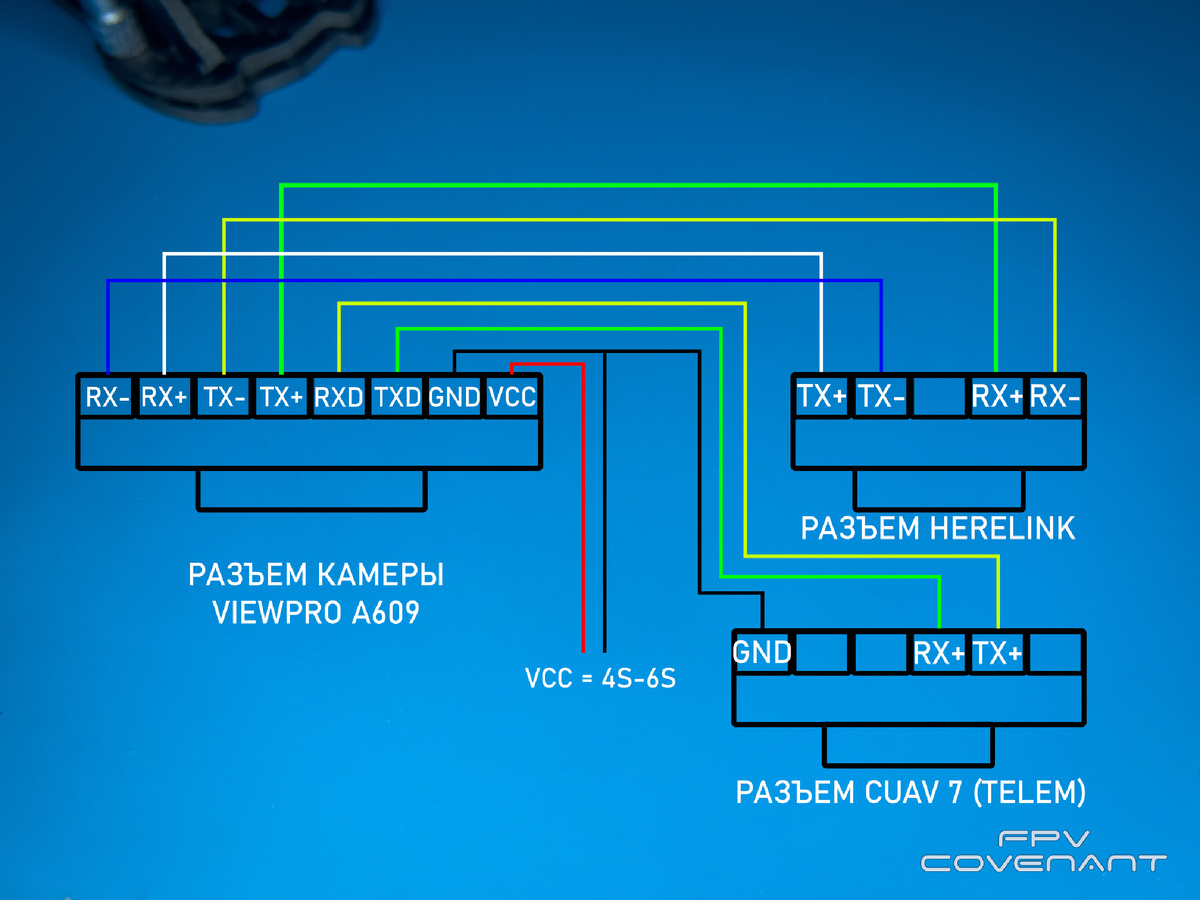
Изготовим провод соединяющий камеру с юнитом Herelink и CUAV7.
В итоге у нас должен получиться провод через который происходит питание камеры, управление камерой и передача видео.
Осуществим подключение камеры к юниту Herelink и CUAV7.
Питание с камеры подключим к плате распределения и понижения питания на напряжение 24 Вольта.
Для подключения разъема управления к CUAV7 будем использовать разъем Telem 2.
На этом этапе подключения произведены, перейдем к настройке.
Подключение камеры Viewpro A609 к CUAV7: проверка работоспособности
Для проверки работоспособности камеры нам потребуется определить какой ip адрес назначен камере.
По умолчанию камера имеет адрес 192.168.2.119
В нашем случае адрес был уже изменен и мы знаем, что он находится в подсети 192.168.144.х
Включаем питание дрона , запускаем наземную станцию управления и убеждаемся что происходит сопряжение между наземной станцией и юнитом.
Проверим доступность камеры с помощью программы Advanced IP Scanner. Для этого вводим диапазон сканирования 192.168.144.1 - 192.168.144.255.
Мы видим в сети наши устройства 192.168.144.5 - наземная станция управления (компьютер), 192.168.144.10 и 192.168.144.11 - это наши юниты Herelink наземный и воздушный модуль, 192.168.144.25 - камера ViewPro A609. Все отлично, камера определяется в сети.
Для настройки камеры нам потребуется приложение от производителя ViewLink.
Загружаем и запускаем. Для начала нам требуется ввести IP адрес камеры и адрес потока видео. Для подключения к камере требуется нажать CONNECT.
Иногда видео поток может не запуститься. Можно попробовать нажать CLOSE VIDEO и снова нажать на OPEN VIDEO.
Появилась трансляция видео с камеры. В правой части расположены кнопки для управления подвесом камеры. Можем попробовать поуправлять.
Далее мы переходим в раздел Setting и выбираем Camera Settings. Именно тут мы можем изменять различные настройки камеры.
Если потребуется назначить IP адрес, это можно сделать в этой вкладке.
Далее переходим в раздел Remote Control. Тут важно обратить внимание на выбор порта управления камеры. В нашем варианте подключения команды управления подвесом будут передаваться через UART. Выбираем - Serial Port Open.
Далее нам надо выбрать каналы для управления камерой, которые мы назначим на пульте управления. Для пробного управления поворотом и углом наклона камеры выберем 7 и 8 канал.
Перейдем к настройкам камеры в Mission Planner.
Подключение камеры Viewpro A609 к CUAV7: настройка Mission Planner
Запускаем Mission Planner на ноутбуке с наземной станцией управления Herelink.
Нам потребуется выбрать режим подключения UDPCI и нажать CONNECT.
Вводим IP адрес 192.168.144.11 (Как мы уже разбирались выше это адрес юнита наземной станции управления).
Вводим порт удаленного подключения 14552 (при следующем подключении эти данные сохранятся).
Наша наземная станция удачно подключилась к дрону через радиоканал организованный между двумя модулями Herelink.
Приступим к настройкам. Переходим во вкладку Config, выбираем Full Parameter List и ищем в дереве Serial2 - порт на который мы подключили камеру.
Изменим значения на:
SERIAL2_PROTOCOL = 8 (Gimbal)
SERIAL2_BAUD = 115
По завершению не забываем нажать на кнопку Write Params.
Далее ищем в дереве MNT1.
Изменим значения на:
MNT1_TYPE = 11 (Viewpro)
Это мы выбрали тип подвеса.
По завершению не забываем нажать на кнопку Write Params.
Выбираем в дереве CAM1.
Изменим значения на:
CAM1_TYPE = 4 (Mount)
По завершению не забываем нажать на кнопку Write Params.
На данном этапе мы закончили настройку камеры. Теперь нам требуется настроить каналы пульта управления которые будут отвечать за управление подвесом.
Переходим в дереве в RC7. Именно тут мы можем изменить настройки тумблера пульта управления закрепленного за 7 каналом.
RC7_OPTION = 213 ("Mount Pitch") — наклон.
По завершению не забываем нажать на кнопку Write Params.
Аналогичным способом определяем настройки для 8 канала. Переходим в дереве в RC8. Тут мы можем изменить настройки тумблера пульта управления закрепленного за 8 каналом.
RC8_OPTION = 214 ("Mount Yaw") — поворот.
По завершению не забываем нажать на кнопку Write Params.
Первоначальные настройки завершены. Попробуем получить видеопоток на экране Mission Planner.
Переходим в раздел DATA. Щелкнем правой кнопкой мыши в окне HUD, и выберем VIDEO и SET GSTREAMER SOURCE
Функция GSTREAMER позволяет стримить видео в окне с любого источника видео находящегося в сети.
Нам потребуется ввести источник видео который имеет определенный формат (GStreamer pipeline).
Для камеры Viewpro A609 вводим:
rtspsrc location=rtsp://192.168.144.25/stream/live?dev=0 latency=41 udp-reconnect=1 timeout=0 do-retransmission=false ! application/x-rtp ! decodebin ! queue max-size-buffers=1 leaky=2 ! videoconvert ! video/x-raw,format=BGRA ! appsink name=outsink sync=false
Мы видим как изображение с камеры появилось в окне Mission Planner.
Так же можно использовать решение состоящее из двух компьютеров и наземной станции управления соединенных между собой с помощью роутера. В таком исполнении один оператор за одним компьютером контролирует полет и карту, второй за вторым компьютером с помощью программы ViewLink видит изображение с камеры и осуществляет управление подвесом.
Завершающим этапом нам требуется подготовить пульт управления. В нашем примере настроим Radiomaster TX12.
Подключение камеры Viewpro A609 к CUAV7: подготовка пульта управления Radiomaster TX12
Подготовим пульт управления Radiomaster TX12 к работе.
Заходим в настройки моделей нажав MDL и создать новую модель для квадрокоптера.
Мы просто скопируем уже имеющуюся, зажав крутилку длинным нажатием и выбрав функцию - копировать модель.
Для удобства назовем новую модель "Vampire". Ее мы будем использовать для всех наших сборок тяжелых дронов.
Далее нам требуется зайти в настройки нашей новой модели и выбрать вкладку MIXES.
Тут мы должны настроить все переключатели нашего пульта согласно каналов на которых мы хотим чтобы они работали. Как правило первые 4 канала у нас настроены по умолчанию - это управление. Далее мы заходим поочередно в каждый канал. Выбираем источник Source, и когда начинает мигать дергаем за кнопку.
Назначаем так - первые 4 канала это управление. Пятый канал - это арм (тумблер).
Шестой канал мы назначим для переключения режимов полета - трехпозиционный тумблер. Седьмой и восьмой канал мы назначим боковые крутилки как раз для управления камерами. Ну соответсвенно дальше назначаем остальные тумблера на каналы, но они начиная с девятого будут работать как кнопка.
На этой стадии настройка модели пульта для нашего тяжелого дрона готова. Попробуем работу пульта управления с подвесом камеры Viewpro A609.
Запускаем дрон, подключаем наземную станцию управления, подключаем пульт к компьютеру.
Загружаем Mission Planner и подключаемся к нашему квадрокоптеру.
Переходим в Джойстик и проводим назначение кнопок пульта управления и сохраняем.
Хочется напомнить: при подключении пульта управления к Mission Planner пропорционально только 8 каналов, а остальные, только как кнопка.
Например: Первые 4 канала это наши стики управления. Остаётся 4, и тут надо четко распределить их. Один переключатель режимы. Ещё канал - слайдер для управления камерой вверх/вниз. Второй слайдер - вправо/влево. Один канал на сброс и один резервный. Остальные можно использовать исключительно как кнопки.
Мы для управления подвесом камеры назначаем 7 и 8 канал на боковые слайдеры.
Чтобы джойстик начал передавать сигналы на полетный контроллер обязательно надо нажать на кнопку Включить.
Обязательно проведем еще разок калибровку.
Ну что попробуем как все работает?

Управление камеры прекрасно работает с помощью боковых слайдеров пульта управления.
Подводя итог можно сказать, Viewpro A609 — это яркий пример того, как современные камеры для дронов эволюционируют в сторону универсальных "цифровых органов чувств", сочетающих высокое качество картинки, тепловизионное зрение и искусственный интеллект в компактном и легком корпусе.
Если статья оказалась полезной ставьте лайк, в комментариях ждем дополнения по камерам Viewpro и вопросы!