Детальное объяснение конструкции статора с переключаемой схем.
🔌 Вы когда-нибудь задумывались, почему одни двигатели БПЛА работают плавно как шелк, а другие выдают невероятную динамику? Секрет может крыться не в магнитах или подшипниках, а в том, как соединены обмотки статора!
Если вы следили за нашими публикациями последних недель, то уже знаете, что двигатели могут работать в схемах "Звезда" и "Треугольник". Но между ними есть не просто разница — есть целая философия проектирования, а где-то на стыке рождается нечто третье... гибридное.
🤔 Что за загадка?
Представьте: у вас есть абсолютно одинаковые двигатели, но один подключен "звездой", другой — "треугольником". Их поведение будет отличаться кардинально:
- Один будет тянуть как трактор на низких оборотах
- Другой раскрутится до умопомрачительных скоростей
- А третий... а третий попробует сделать и то, и другое!
🧩 Мы уже разбирали:
- Физику процесса: Что происходит с напряжением и током в каждой схеме?
- Практику применения: Когда выбирать "звезду", а когда — "треугольник"?
- Инженерный компромисс: Можно ли получить лучшее из обоих миров?
🚀 Почему это важно именно сейчас?
С развитием БПЛА дроны перестали быть просто "летающими камерами". Сегодня это:
- Гоночные аппараты, где каждая миллисекунда на счету
- Промышленные платформы, требующие максимальной эффективности
- Специальные решения для экстремальных условий
И в каждом случае — свой оптимальный способ подключения обмоток.
💡 Что вы узнаете сегодня?
✅ Конкретные формулы преобразования между схемами
✅ Как KV двигателя меняется при переключении со "звезды" на "треугольник"
✅ Почему в серийных БПЛА редко встречается переключаемая схема
✅ Как эмулируют разные подключения современные ESC
✅ Реальные кейсы, где переключение оправдано
🛠️ Мы не просто расскажем о различиях — мы покажем:
- Схемы подключения с визуализацией
- Расчеты эффективности для разных режимов полета
- Примеры реализации в самодельных и промышленных двигателях
Эта статья — не просто теория. Это инструмент для:
- Конструкторов, выбирающих двигатели для новых БПЛА
- Операторов, пытающихся выжать максимум из имеющегося оборудования
- Энтузиастов, экспериментирующих с настройками
- Инженеров, решающих нестандартные задачи
Готовы разобраться, почему одни двигатели "поют", а другие "кричат"? И как заставить их делать и то, и другое по команде?
1. Анатомия трехфазной обмотки статора
1.1 Базовое устройство обмотки
Физическая структура статора:
- Количество фаз: 3 (A, B, C)
- Количество пазов (зубцов): 9, 12, 18, 24 (кратно 3)
- Выводы каждой фазы: 2 (начало и конец)
- Общее количество выводов: 6 (для переключаемой схемы)
Обозначения выводов по стандарту IEC:
- Фаза A: начало - U1, конец - U2
- Фаза B: начало - V1, конец - V2
- Фаза C: начало - W1, конец - W2
1.2 Расположение обмоток в пазах
Для 12-пазового статора (12N):
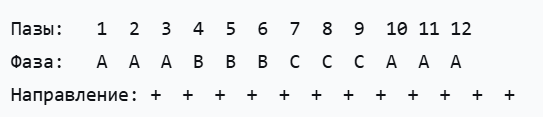
Группы катушек:
- Фаза A: пазы 1-3 и 10-12
- Фаза B: пазы 4-6
- Фаза C: пазы 7-9
2. Схема "Звезда" (Y) - постоянное соединение
2.1 Физическая реализация
Соединение внутри двигателя:
- Концы всех фаз (U2, V2, W2) соединены вместе
- Начала (U1, V1, W1) выведены наружу
- Количество внешних выводов: 3
Внутренняя структура:
2.2 Визуальное представление
3. Схема "Треугольник" (Δ) - постоянное соединение
3.1 Физическая реализация
Соединение внутри двигателя:
- Конец фазы A (U2) соединен с началом фазы B (V1)
- Конец фазы B (V2) соединен с началом фазы C (W1)
- Конец фазы C (W2) соединен с началом фазы A (U1)
- Точки соединения выводятся наружу
Внутренняя структура:
3.2 Визуальное представление
4. Статор с переключаемой схемой (6 выводов)
4.1 Конструкция с полным выводом всех концов
Физическая реализация:
- Все 6 концов фаз выведены наружу
- Соединение осуществляется внешними перемычками или реле
- Количество внешних выводов: 6
Схема выводов:
4.2 Визуальное представление статора
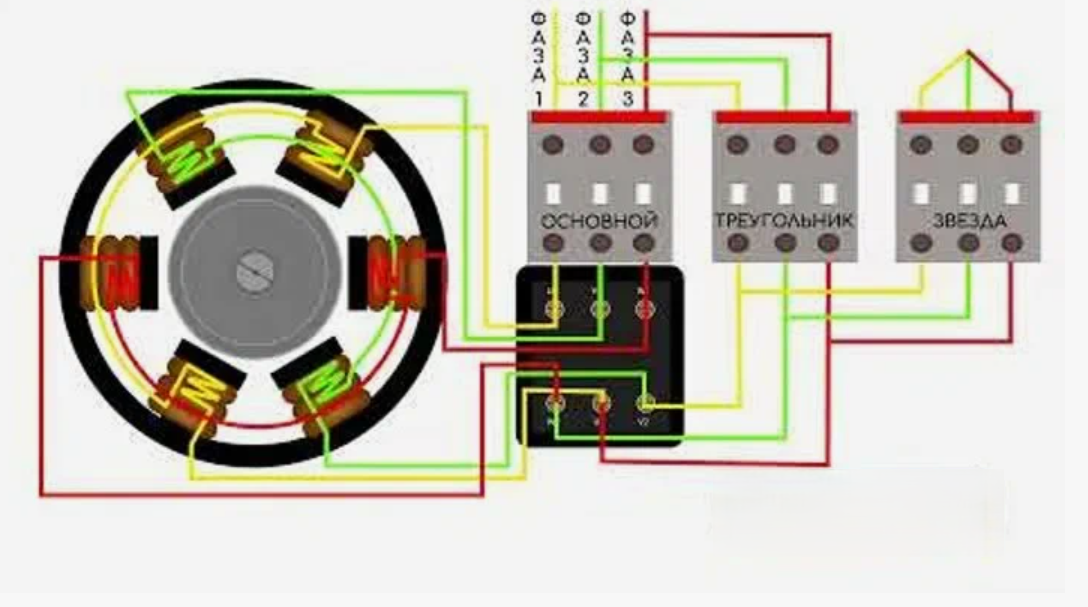
5. Система переключения "Звезда-Треугольник"
5.1 Механическая система переключения (перемычки)
Комплект перемычек для "Звезды":
Комплект перемычек для "Треугольника":
5.2 Визуальная схема переключения
5.3 Электронная система переключения
Схема подключения реле:
- В положении "Y": Реле замыкают U2-V2-W2
- В положении "Δ": Реле замыкают U2-V1, V2-W1, W2-U1
6. Практическая реализация в БПЛА двигателях
6.1 Почему в БПЛА обычно не делают переключаемые схемы
Технические ограничения:
- Размер и вес: Дополнительные провода и переключатели увеличивают массу
- Сложность: 6 проводов вместо 3 усложняют разводку
- Надежность: Механические переключатели - дополнительная точка отказа
- Стоимость: Увеличивает цену двигателя на 20-30%
Альтернативное решение: Современные ESC с электронным переключением
6.2 Современные ESC с виртуальным переключением
Принцип работы:
ESC программно эмулирует разные схемы соединения, изменяя алгоритм управления.
Для эмуляции "Звезды":
- Подается напряжение между фазами
- Фазный ток рассчитывается для звезды
Для эмуляции "Треугольника":
- Имитируется циклическое переключение
- Изменяются коэффициенты преобразования
Пример реализации в BLHeli_32:
7. Подробный пример: двигатель T-Motor F60 Pro III
7.1 Стандартная версия (3 провода)
Схема соединения: Постоянная "Звезда"
Выводы: 3 провода (синий, желтый, черный)
Внутреннее соединение: U2-V2-W2 соединены
7.2 Экспериментальная версия (6 проводов)
Конструкция:
Пазы: 12
Фазы: A, B, C по 4 катушки каждая
Выводы:
A: Красный (U1), Красный/полоска (U2)
B: Белый (V1), Белый/полоска (V2)
C: Синий (W1), Синий/полоска (W2)
Схема переключения:
Набор перемычек в комплекте:
Для "Y": 3-контактная перемычка (U2-V2-W2)
Для "Δ": 3 парные перемычки (U2-V1, V2-W1, W2-U1)
8. Расчет параметров для переключаемой схемы
8.1 Формулы преобразования
Соотношения параметров:
Для звезды (Y):
V_фазное = V_линейное / √3
I_фазное = I_линейное
KV_Y = KV_базовое
Для треугольника (Δ):
V_фазное = V_линейное
I_фазное = I_линейное / √3
KV_Δ = KV_Y × √3
8.2 Пример расчета для двигателя 2207
Исходные данные (в звезде):
- KV_Y = 2700 об/мин/В
- R_фазы_Y = 0.03 Ом
- Макс. ток фазы = 40 А
При переходе в треугольник:
KV_Δ = 2700 × 1.732 = 4676 об/мин/В
R_фазы_Δ = 0.03 / 3 = 0.01 Ом (параллельное соединение)
Макс. ток фазы = 40 / 1.732 = 23.1 А
Но линейный ток остается 40 А
8.3 Влияние на тепловой режим
Потери в меди:
P_cu_Y = 3 × I² × R_фазы_Y = 3 × 40² × 0.03 = 144 Вт
P_cu_Δ = 3 × (I/√3)² × (R_фазы_Y/3) = 3 × (23.1)² × 0.01 = 16 Вт
Важно: Это при одинаковой механической мощности!
9. Практические рекомендации по реализации
9.1 Для самодельных конструкций
Материалы:
- Двигатель с 6 выводами (или переделать существующий)
- Клеммная колодка на 6 позиций
- Набор перемычек
- Термоусадка для изоляции
Процедура:
- Аккуратно разобрать двигатель
- Найти соединения нейтральной точки (для звезды)
- Разъединить их, вывести отдельные провода
- Собрать с сохранением балансировки
9.2 Готовые решения
Коммерческие двигатели с переключением:
- Cobra CM-2206 (специальная версия с 6 выводами)
- T-Motor MN3508 (промышленная серия)
- KDE Direct 4215XF (с разъемом для переключения)
Стоимость: На 25-40% выше аналогов с фиксированным соединением.
10. Применение в реальных условиях БПЛА
10.1 Ситуации, где переключение оправдано
1. Мультирежимные БПЛА:
- Взлет/посадка: "Звезда" (высокий момент)
- Крейсерский полет: "Треугольник" (высокие обороты)
2. Изменение условий полета:
- Высокогорье: "Треугольник" для компенсации потери плотности
- Высокая температура: "Звезда" для снижения тока
3. Экспериментальные платформы:
- Тестирование разных конфигураций
- Поиск оптимальных параметров
10.2 Автоматическое переключение
Система на основе телеметрии:
Алгоритм:
if (altitude > 2000m && throttle > 80%) {
switch_to_delta();
} else if (motor_temp > 80°C) {
switch_to_star();
}
Аппаратная реализация:
- ESC с дополнительными выводами управления
- Реле с управлением от полетного контроллера
- Оптопары для гальванической развязки
11. Ограничения и проблемы
11.1 Технические сложности
1. Балансировка: При разъединении/соединении выводов может нарушиться балансировка ротора.
2. Вибрации: Дополнительные соединения - дополнительные источники вибраций.
3. Надежность контактов: Механические переключатели в условиях вибраций БПЛА ненадежны.
4. Индуктивность проводников: Длинные провода к переключателю увеличивают индуктивность.
11.2 Электромагнитные проблемы
Скин-эффект в перемычках:
На высоких частотах (десятки кГц) ток вытесняется к поверхности проводников. Перемычки должны быть многожильными или плоскими.
Взаимоиндукция: Близкое расположение проводов разных фаз вызывает взаимную индуктивность, влияющую на коммутацию.
12. Заключение
Статор с переключаемой схемой "Звезда-Треугольник" физически представляет собой трехфазную обмотку с выведенными началами и концами всех фаз (6 проводов).
Ключевые особенности:
- Для "Звезды": Концы фаз (U2, V2, W2) соединены вместе, питания подается на начала (U1, V1, W1)
- Для "Треугольника": Начало каждой фазы соединяется с концом предыдущей по циклу
В БПЛА такая конструкция редко применяется из-за:
- Увеличения массы и сложности
- Проблем с надежностью
- Достаточности электронной эмуляции в современных ESC
Однако для специализированных применений или экспериментов реализация переключаемой схемы позволяет:
- Оптимизировать двигатель под разные режимы полета
- Адаптироваться к изменяющимся условиям
- Изучать влияние схемы соединения на характеристики
Практический совет: Для большинства применений в БПЛА достаточно выбрать двигатель с оптимальной фиксированной схемой ("Звезда" для большинства случаев), а регулировку характеристик осуществлять через настройки ESC и выбор KV.